4 standard connection diagram, Absolute position detection system – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 311
15 - 4
15. ABSOLUTE POSITION DETECTION SYSTEM
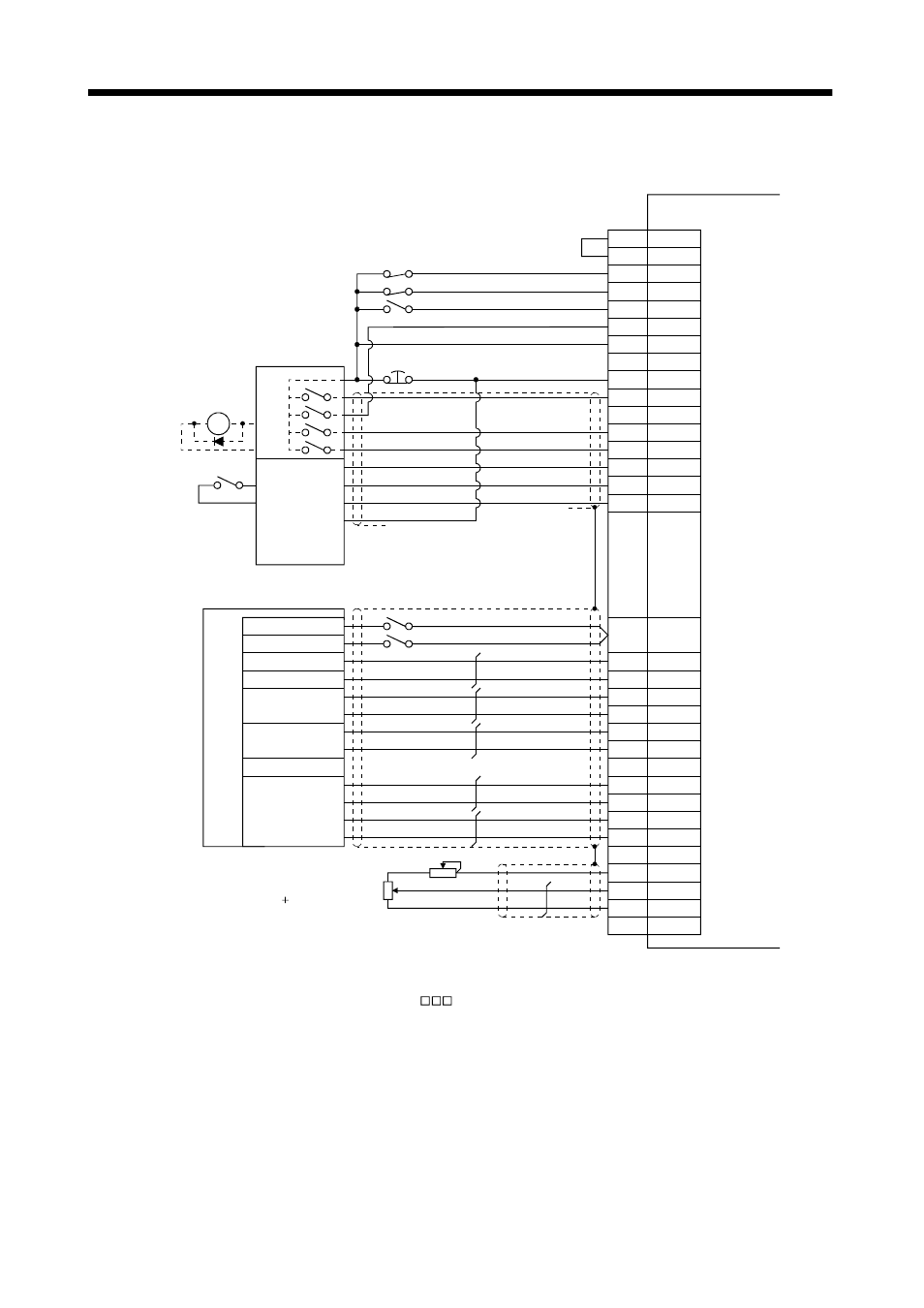
15.4 Standard connection diagram
CR
SG
RA2
CN1B-3
CN1B-13
COM
CN1B-16
LSP
CN1B-17
LSN
CN1B-7
TL
CN1B-14
RES
CN1B-10
SG
CN1B-5
SON
CN1B-15
EMG
CN1B-8
ABSM
CN1B-9
ABSR
CN1B-4
DO1
CN1B-19
ZSP
CN1B-6
TLC
VDD
SG
CN1A-10
CN1B-3
VDD
CN1A-19
RD
CN1A-4
P15R
CN1A-14
OP
CN1A-8
CN1A-20
CN1A-3
PP
CN1A-13
PG
CN1A-2
NP
CN1A-12
NG
CN1B-11
P15R
CN1B-12
TLA
CN1B-1
LG
Plate
SD
Servo amplifier
I/O module
Input
Output
Reset
Reset
(Note 3)
EMG (Note 1)
P
o
si
ti
oni
ng
m
odul
e
(Note 2) Stroke end in forward rotation
Stroke end in reverse rotation
External torque control
Electromagnetic
brake output
Near-zero point signal
Stop signal
Power supply (24V)
Ready
Zero-point
signal
Clear
Command
pulses
(for differential
line driver type)
Dog
Stop
Emergency stop
Servo-on
ABS transmission
mode
ABS request
ABS bit 0
ABS bit 1
Send data ready
Torque limit
10V/max.torque
Upper limit setting
Note 1. Always install the emergency stop switch.
2. For operation, always turn on forward rotation stroke end (LSP)/reverse rotation stroke end (LSN).
3. When using the torque limit signal (TL), set " 4" in parameter No.46 to assign TL to pin CN1B-7.