Signals and wiring – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 67
3 - 20
3. SIGNALS AND WIRING
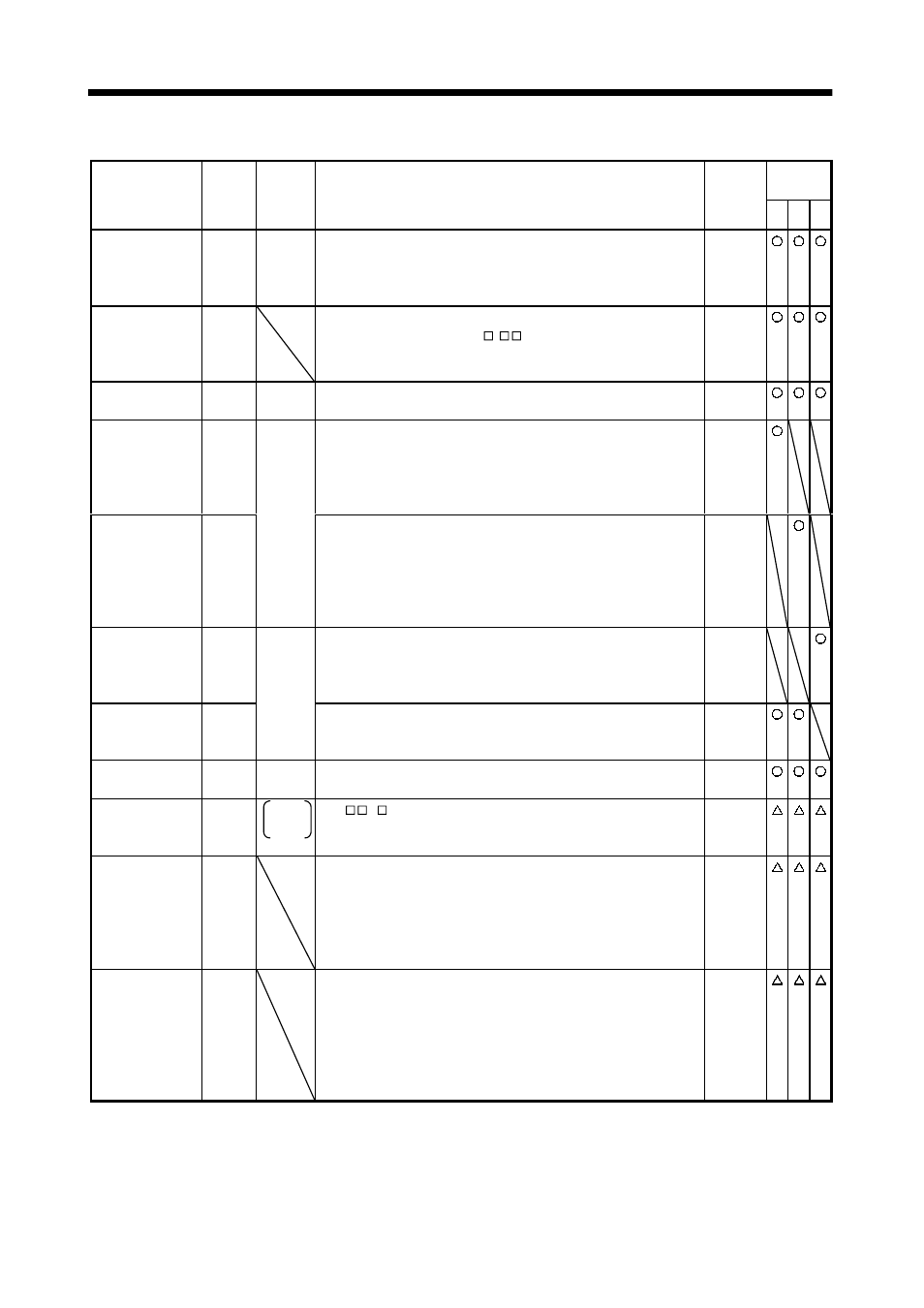
(2) Output signals
Control
mode
Signal
Symbol
Connec-
tor pin
No.
Functions/Applications
I/O
division
P
S
T
Trouble
ALM
CN1B
18
ALM turns off when power is switched off or the protective circuit
is activated to shut off the base circuit.
Without alarm occurring, ALM turns on within about 1s after
power-on.
DO-1
Dynamic brake
interlock
DB
This signal can be used with the 11kW or more servo amplifier.
When using this signal, set " 1 " in parameter No. 1.
When the dynamic brake is operated, DB turns off. (Refer to
Section 13.1.4.)
DO-1
Ready
RD
CN1A
19
RD turns on when the servo is switched on and the servo
amplifier is ready to operate.
DO-1
In position
INP
INP turns on when the number of droop pulses is in the preset in-
position range. The in-position range can be changed using
parameter No. 5.
When the in-position range is increased, INP-SG may be kept
connected during low-speed rotation.
DO-1
Speed reached
SA
CN1A
18
SA turns off when servo on (SON) turns off or the servomotor
speed has not reached the preset speed with both forward rotation
start (ST1) and reverse rotation start (ST2) turned off. SA turns
on when the servomotor speed has nearly reached the preset
speed. When the preset speed is 20r/min or less, SA always turns
on.
DO-1
Limiting speed
VLC
VLC turns on when speed reaches the value limited using any of
the internal speed limits 1 to 7 (parameter No. 8 to 10, 72 to 75)
or the analog speed limit (VLA) in the torque control mode.
VLC turns off when servo on (SON) turns off.
DO-1
Limiting torque
TLC
CN1B
6
TLC turns on when the torque generated reaches the value set to
the internal torque limit 1 (parameter No. 28) or analog torque
limit (TLA).
DO-1
Zero speed
ZSP
CN1B
19
ZSP turns on when the servo motor speed is zero speed (50r/min)
or less. Zero speed can be changed using parameter No. 24.
DO-1
Electromagnetic
brake interlock
MBR
CN1B
19
Set " 1 " in parameter No. 1 to use this parameter. Note that
ZSP will be unusable.
MBR turns off when the servo is switched off or an alarm occurs.
DO-1
Warning
WNG
To use this signal, assign the connector pin for output using
parameter No.49. The old signal before assignment will be
unusable.
When warning has occurred, WNG turns on.
When there is no warning, WNG turns off within about 1s after
power-on.
DO-1
Battery warning
BWNG
To use this signal, assign the connector pin for output using
parameter No.49. The old signal before assignment will be
unusable.
BWNG turns on when battery cable breakage warning (AL. 92) or
battery warning (AL. 9F) has occurred.
When there is no battery warning, BWNG turns off within about
1s after power-on.
DO-1