4 encoder cable flexing life, Characteristics – MITSUBISHI ELECTRIC MELSERVO MR-J2S- A User Manual
Page 224
12 - 7
12. CHARACTERISTICS
Use the dynamic brake at the load inertia moment indicated in the following table. If the load inertia
moment is higher than this value, the built-in dynamic brake may burn. If there is a possibility that the
load inertia moment may exceed the value, contact Mitsubishi.
Servo amplifier
Load inertia moment ratio [times]
MR-J2S-10A to MR-J2S-200A
MR-J2S-10A1 to MR-J2S-40A1
30
MR-J2S-350A
16
MR-J2S-500A MR-J2S-700A
15
MR-J2S-11KA to MR-J2S-22KA
(Note)
30
Note. The value assumes that the external dynamic brake is used.
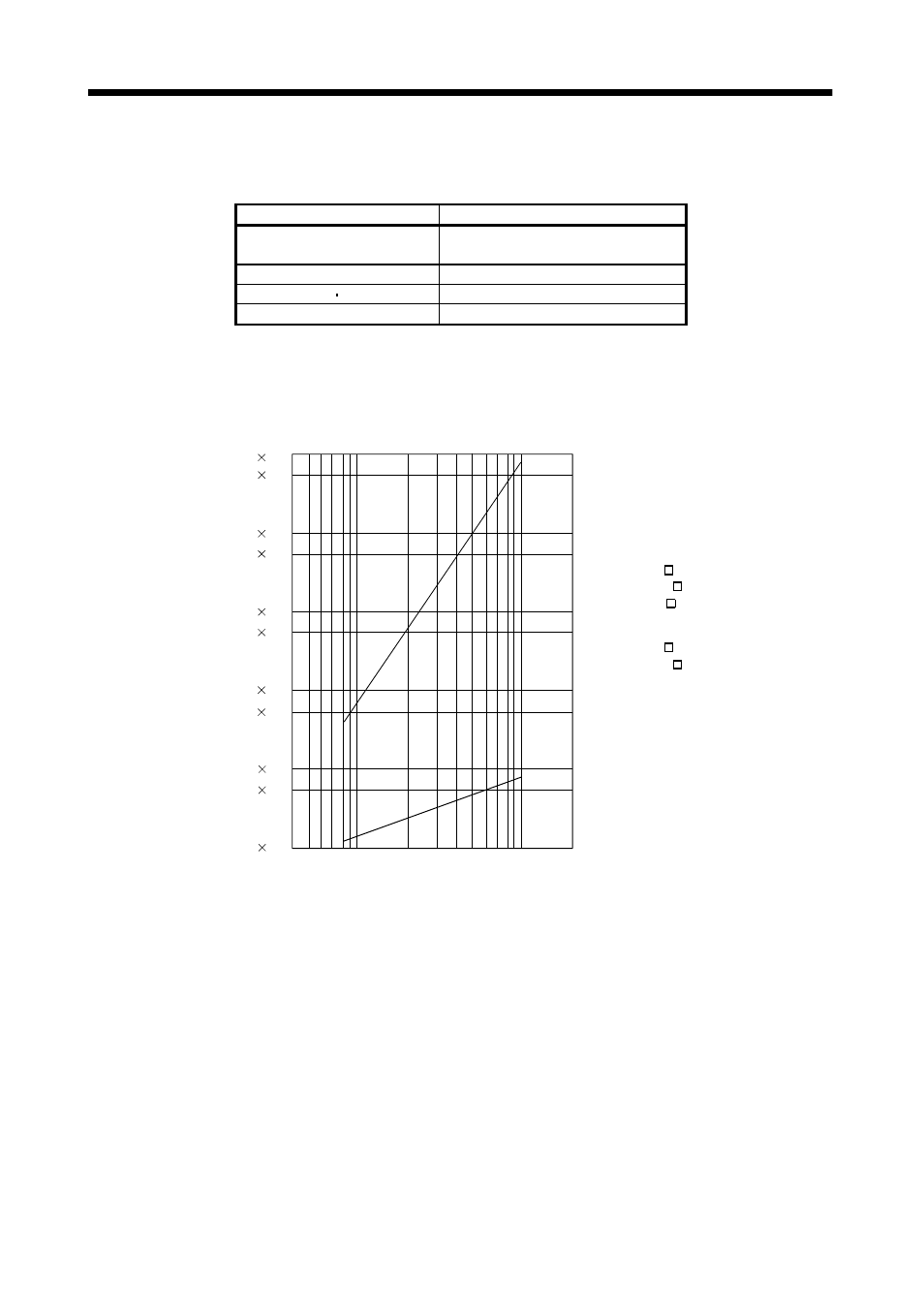
12.4 Encoder cable flexing life
The flexing life of the cables is shown below. This graph calculated values. Since they are not guaranteed
values, provide a little allowance for these values.
1 10
7
5 10
7
1 10
8
5 10
6
1 10
6
5 10
5
1 10
5
5 10
4
1 10
4
5 10
3
1 10
3
a
b
F
lexi
ng l
if
e
[
ti
m
es]
4
7
10
20
40
70 100
200
Flexing radius [mm]
a : Long flexing-life encoder cable
MR-JCCBL M-H
MR-JHSCBL M-H
MR-ENCBL M-H
b : Standard encoder cable
MR-JCCBL M-L
MR-JHSCBL M-L