3 axis control commands, 1 current position set (pos), 1) overview – Yaskawa MP2000 Series: User's Manual for Motion Programming User Manual
Page 185: Caution
8 Command Reference
8.3.1 Current Position Set (POS)
8-78
8.3 Axis Control Commands
This section describes the axis control commands.
8.3.1 Current Position Set (POS)
(1) Overview
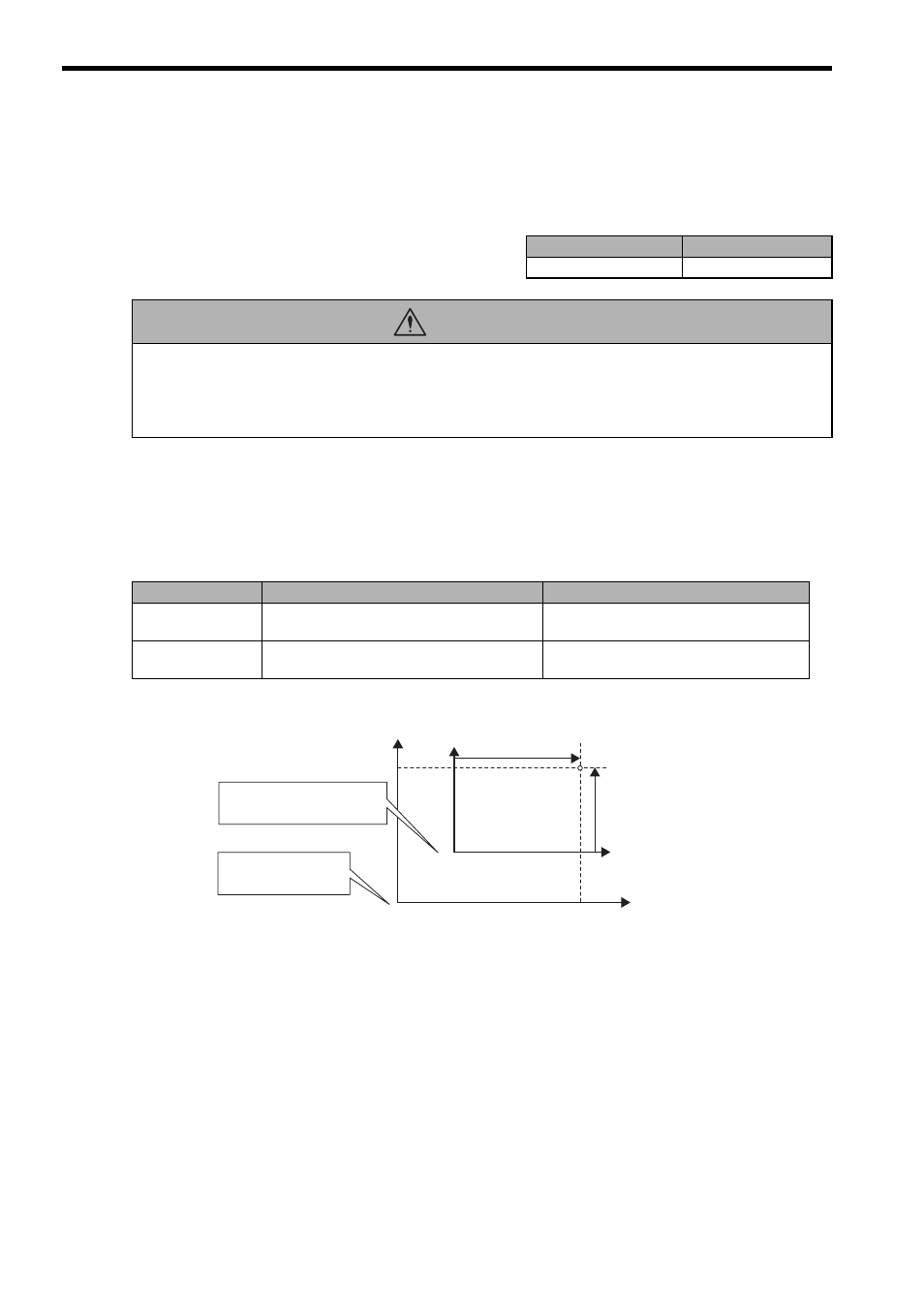
The Current Position Set command (POS) changes the current position to a desired coordinate value to create a
new coordinate system. In this manual, the newly set coordinate system is referred to as the “work coordinate
system” while the original coordinate system of machine is referred to as the “machine coordinate system.”
Move commands coded after a POS command will be executed to move axes in the work coordinate system.
Fig. 8.46 Work Coordinate System Setting by POS Command
The work coordinate system can be changed as often as desired by using the POS command. The machine coor-
dinate system must be set in advance. The machine coordinate system is not affected by the POS command.
Up to 16 axes can be designated in a POS command block. The work coordinate system for an axis not designated
in the POS command block will not be constructed or updated.
Move commands in a work coordinate system cannot exceed the maximum programmable value when converted
to coordinates in the machine coordinate system.
Motion Programs
Sequence Programs
Applicable
Not applicable
• Care is required with the Current Position Set (POS) command.
The Current Position Set (POS) command is used to create new work coordinate system values. If POS is specified
incorrectly, subsequent move operations will be entirely different. Before starting operations, be sure to check that the
work coordinate system is specified correctly.
Failure to carry out this check may result in damage to equipment, serious personal injury, or even death.
CAUTION
Coordinate System
Description
Remarks
Machine Coordi-
nate System
Original coordinate system of machine
The position for zero point return is the ori-
gin (0).
Work Coordinate
System
Coordinate system constructed by the user
defined position
A new coordinate system constructed by
POS command execution
(Logical axis 1)
Logical axis 1
Logical axis 1
(Logical axis 2)
Logical axis 2
Logical axis 2
Work coordinate system
Machine coordinate system
Current position
(0,0)
(0,0)
Zero point return position
(Origin of machine
coordinate system)
Origin set by POS command
execution
(Origin of work coordinate system)