Yaskawa MP2000 Series: User's Manual for Motion Programming User Manual
Page 155
8 Command Reference
8.2.1 Positioning (MOV)
8-48
(a) No acceleration/deceleration
Movement with both the acceleration time and deceleration time set to 0
(b) Single-step linear acceleration/deceleration
Movement with a constant acceleration/deceleration speed
(c) S-curve acceleration/deceleration
Movement at S-curved acceleration/deceleration speed
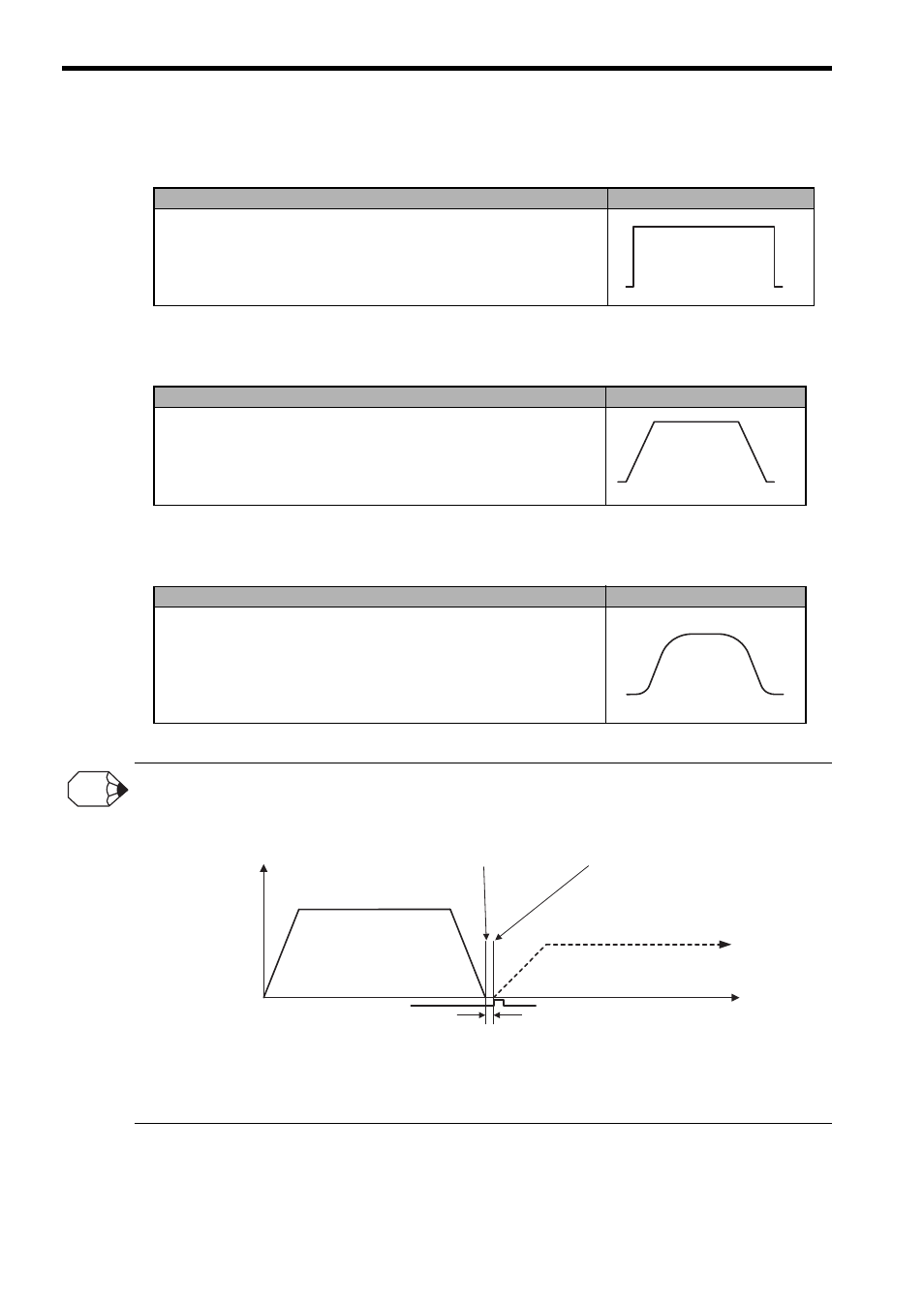
For axis movement with a MOV command, an in-position check is executed to verify that the axis enters the positioning
completion range. After the in-position check, the next move command block will be executed.
The following diagram illustrates the in-position execution.
Fig. 8.25 Execution of In-position Check
Setting Method
Movement Path
• OW
03, bit 4 to 7: Acceleration/deceleration degree unit selection = 1
(ms)
• OW
03, bit 8 to B: Filter type selection = 0 (No filter)
• Set the ACC command to 0.
• Set the DCC command to 0.
Setting Method
Movement Path
• OW
03, bit 4 to 7: Acceleration/deceleration degree unit selection = 1
(ms)
• OW
03, bit 8 to B: Filter type selection = 0 (No filter)
• Set the ACC command to a value other than 0.
• Set the DCC command to a value other than 0.
Setting Method
Movement Path
• OW
03, bit 4 to 7: Acceleration/deceleration degree unit selection = 1
(ms)
• OW
03, bit 8 to B: Filter type selection = 2 (Moving average filter)
• Set the ACC command to a value other than 0.
• Set the DCC command to a value other than 0.
• Set the SCC command to a value other than 0.
INFO
Positioning command block
The next command block
In-position check
Motion monitor parameter
IW
0C, Bit1 Positioning Completed
The value that is set in the motion setting parameter
OL
1E: Width of positioning completion.
Distribution completed
Speed (V)
Time (t)
The feedback position is within
the positioning completion width.