Yaskawa CIMR-AU 200V Drives User Manual
Page 303
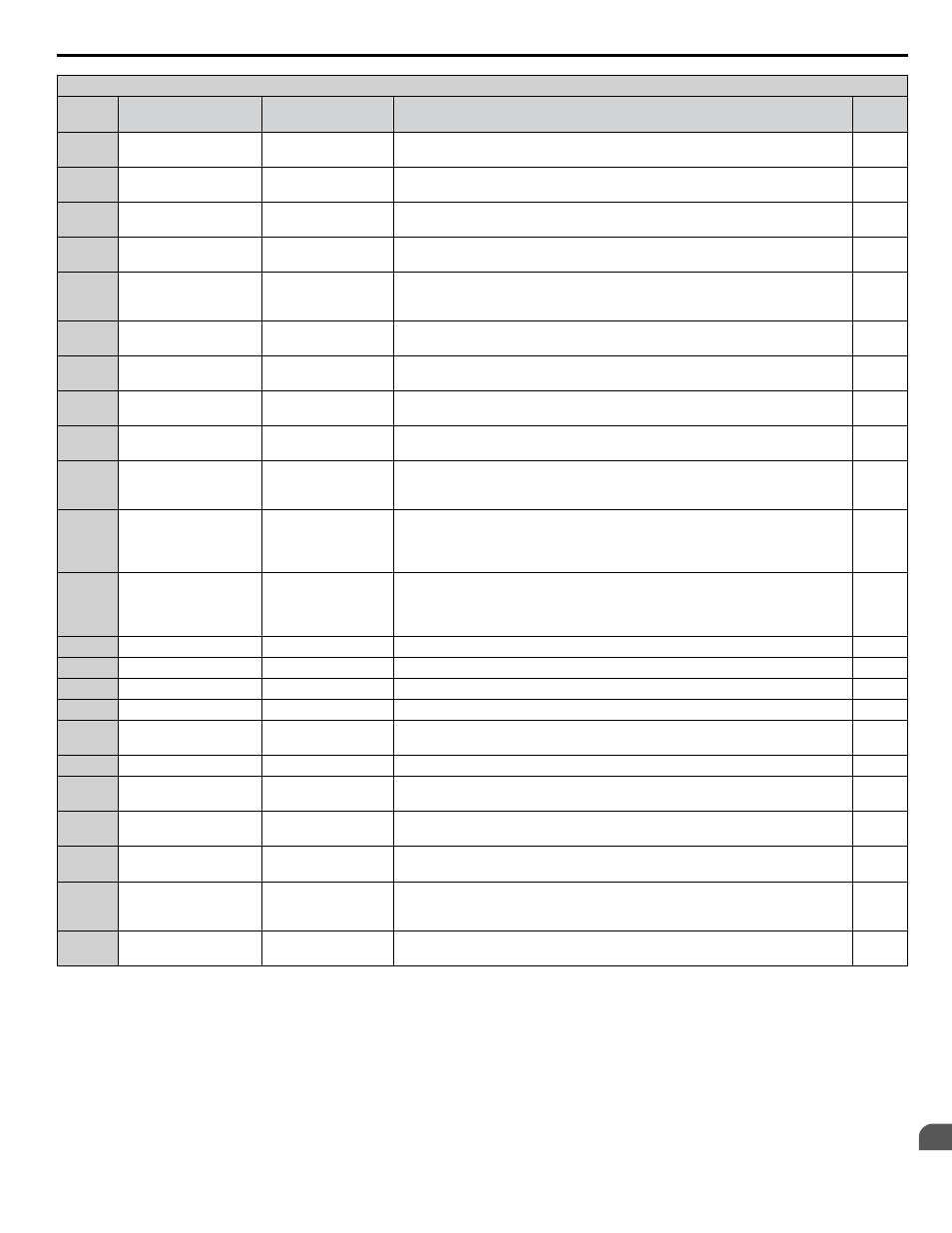
H1 Multi-Function Digital Input Selections
H1-oo
Setting
Function
LCD Display
Description
Page
6
Jog reference selection
Jog Freq Ref
Closed: Jog frequency reference (d1-17) selected. Jog has priority over all other
reference sources.
–
7
Accel/decel time
selection 1
Multi-Acc/Dec 1
Used to switch between accel/decel time 1 (set in C1-01, C1-02) and accel/decel
time 2 (set in C1-03, C1-04).
–
8
Baseblock command
(N.O.)
Ext BaseBlk N.O.
Closed: No drive output
–
9
Baseblock command
(N.C.)
Ext BaseBlk N.C.
Open: No drive output
–
A
Accel/decel ramp hold
Acc/Dec RampHold
Open: Accel/decel is not held
Closed: The drive pauses during acceleration or deceleration and maintains the
output frequency.
–
B
Drive overheat alarm
(oH2)
OH2 Alarm Signal
Closed: Closes when an oH2 alarm occurs
–
C
Analog terminal input
selection
Term A2 Enable
Open: Function assigned by H3-14 is disabled.
Closed: Function assigned by H3-14 is enabled.
–
D
PG encoder disable
PG Fdbk Disable
Open: Speed feedback for V/f Control with PG is enabled.
Closed: Speed feedback disabled.
–
E
ASR integral reset
ASR Intgrl Reset
Open: PI control
Closed: Integral reset
–
F
Through mode
Term Not Used
Select this setting when the terminal is not used or when using the terminal in the
pass-through mode. The terminal does not trigger a drive function, but can be used
as digital input for the controller to which the drive is connected.
–
10
Up command
Up Command 1
The drive accelerates when the Up command terminal closes, and decelerates when
the Down command closes. When both terminals are closed or both are open, the
drive holds the frequency reference. The Up and Down commands must always
be used in conjunction with one another.
–
11
Down command
Down Command 1
The drive accelerates when the Up command terminal closes, and decelerates when
the Down command closes. When both terminals are closed or both are open, the
drive holds the frequency reference. The Up and Down commands must always
be used in conjunction with one another.
–
12
Forward Jog
Forward Jog
Closed: Runs forward at the Jog frequency d1-17.
–
13
Reverse Jog
Reverse Jog
Closed: Runs reverse at the Jog frequency d1-17.
–
14
Fault reset
Fault Reset
Closed: Resets faults if the cause is cleared and the Run command is removed.
–
15
Fast Stop (N.O.)
Fast-Stop N.O.
Closed: Decelerates at the Fast Stop time set to C1-09.
–
16
Motor 2 selection
Motor 2 Select
Open: Motor 1 (E1-oo, E2-oo)
Closed: Motor 2 (E3-oo, E4-oo)
–
17
Fast Stop (N.C.)
Fast-Stop N.C.
Open: Decelerates to stop at the Fast Stop time set to C1-09.
–
18
Timer function input
Timer function
Triggers the timer set up by parameters b4-01 and b4-02. Must be set in conjunction
with the timer function output (H2-oo = 12).
–
19
PID disable
PID Disable
Open: PID control enabled
Closed: PID control disabled
–
1A
Accel/decel time
selection 2
Multi-Acc/Dec 2
Used in conjunction with an input terminal set for “Accel/decel time selection 1”
(H1-oo = 7), and allows the drive to switch between accel/decel times 3 and 4.
–
1B
Program lockout
Program Lockout
Open: Parameters cannot be edited (except for U1-01 if the reference source is
assigned to the digital operator).
Closed: Parameters can be edited and saved.
–
1E
Reference sample hold
Ref Sample Hold
Closed: Samples the analog frequency reference and operates the drive at that
speed.
–
B.7 H Parameters: Multi-Function Terminals
YASKAWA ELECTRIC TOEP C710616 41E YASKAWA AC Drive - A1000 Quick Start Guide
303
B
Parameter List