B5: pid control – Yaskawa CIMR-AU 200V Drives User Manual
Page 271
u
b5: PID Control
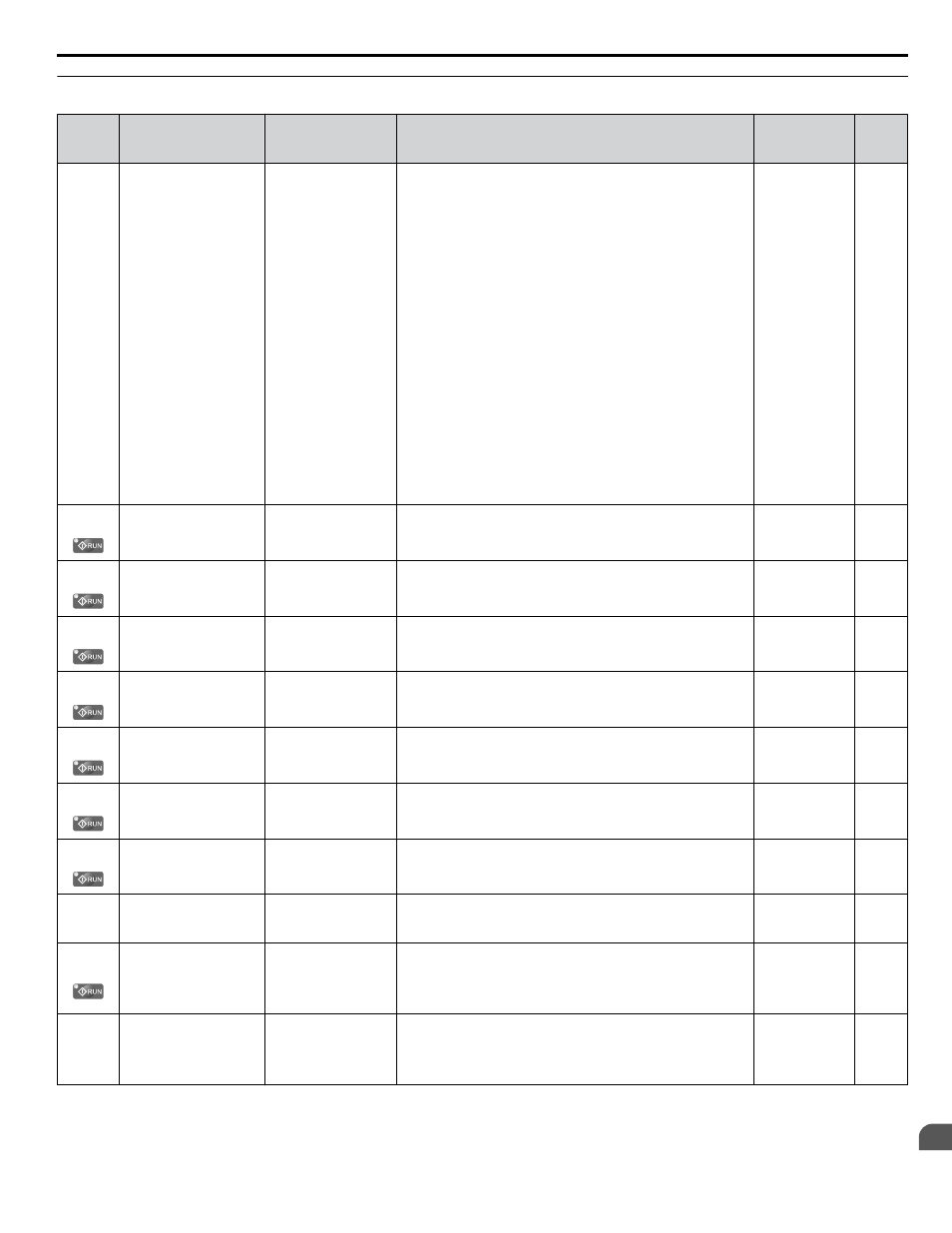
No.
(Addr.
Hex)
Name
LCD Display
Description
Values
Page
b5-01
(01A5) PID Function Setting
PID Mode
0: Disabled
1: Enabled D=Fdbk
2: Enabled D=Fdfwd
3: Fref+PID D=Fdbk
4: Fref+PID D=Fdfwd
5: Enabled D=Fdbk2
6: Enabled D=Fdfwd2
7: Fref+PID D=Fdbk2
8: Fref
+PIDD=Fdfwd2
0: Disabled
1: Enabled (PID output becomes output frequency reference,
deviation D controlled)
2: Enabled (PID output becomes output frequency reference,
feedback D controlled)
3: Enabled (PID output added to frequency reference, deviation
D controlled)
4: Enabled (PID output added to frequency reference, feedback
D controlled)
5: Mode compatible with setting 1 of similar products from a
previous product line
6: Mode compatible with setting 2 of similar products from a
previous product line
7: Mode compatible with setting 3 of similar products from a
previous product line
8: Mode compatible with setting 4 of similar products from a
previous product line
Note:
1. If the drive is replaced with Varispeed F7
drive or a similar product from a previous
product line, use settings 5 to 8 instead of
settings 1 to 4.
2. Settings 5 to 8 are not available in models
4A0930 and 4A1200.
Default: 0
<1>
Range: 0 to 8
<2>
–
b5-02
(01A6) Proportional Gain
Setting (P)
PID Gain
Sets the proportional gain of the PID controller.
Default: 1.00
Min.: 0.00
Max.: 25.00
–
b5-03
(01A7) Integral Time Setting (I) PID I Time
Sets the integral time for the PID controller.
Default: 1.0 s
Min.: 0.0
Max.: 360.0
–
b5-04
(01A8) Integral Limit Setting
PID I Limit
Sets the maximum output possible from the integrator as a
percentage of the maximum output frequency.
Default: 100.0%
Min.: 0.0
Max.: 100.0
–
b5-05
(01A9) Derivative Time (D)
PID D Time
Sets D control derivative time.
Default: 0.00 s
Min.: 0.00
Max.: 10.00
–
b5-06
(01AA) PID Output Limit
PID Limit
Sets the maximum output possible from the entire PID
controller as a percentage of the maximum output frequency.
Default: 100.0%
Min.: 0.0
Max.: 100.0
–
b5-07
(01AB) PID Offset Adjustment PID Offset
Applies an offset to the PID controller output. Set as a
percentage of the maximum output frequency.
Default: 0.0%
Min.: -100.0
Max.: 100.0
–
b5-08
(01AC) PID Primary Delay Time
Constant
PID Delay Time
Sets a low pass filter time constant on the output of the PID
controller.
Default: 0.00 s
Min.: 0.00
Max.: 10.00
–
b5-09
(01AD)
PID Output Level
Selection
Output Level Sel
0: Normal Character
1: Rev Character
0: Normal output (direct acting)
1: Reverse output (reverse acting)
Default: 0
Range: 0, 1
–
b5-10
(01AE) PID Output Gain Setting Output Gain
Sets the gain applied to the PID output.
Note:
Parameter setting cannot be changed when the
drive is operating the motor in models 4A0930
and 4A1200.
Default: 1.00
Min.: 0.00
Max.: 25.00
–
b5-11
(01AF)
PID Output Reverse
Selection
Output Rev Sel
0: 0 limit
1: Reverse
0: Negative PID output triggers zero limit.
1: Rotation direction reverses with negative PID output.
Note:
When using setting 1, make sure reverse
operation is permitted by b1-04.
Default: 0
Range: 0, 1
–
B.2 b: Application
YASKAWA ELECTRIC TOEP C710616 41E YASKAWA AC Drive - A1000 Quick Start Guide
271
B
Parameter List