Proportional/integral/derivative block, Proportional/integral/derivative block -23 – Rockwell Automation PLC-5 Fieldbus Solutions for Integrated Architecture User Manual User Manual
Page 37
Publication 1757-UM006A-EN-P - May 2002
The Fieldbus Communication Model 1-23
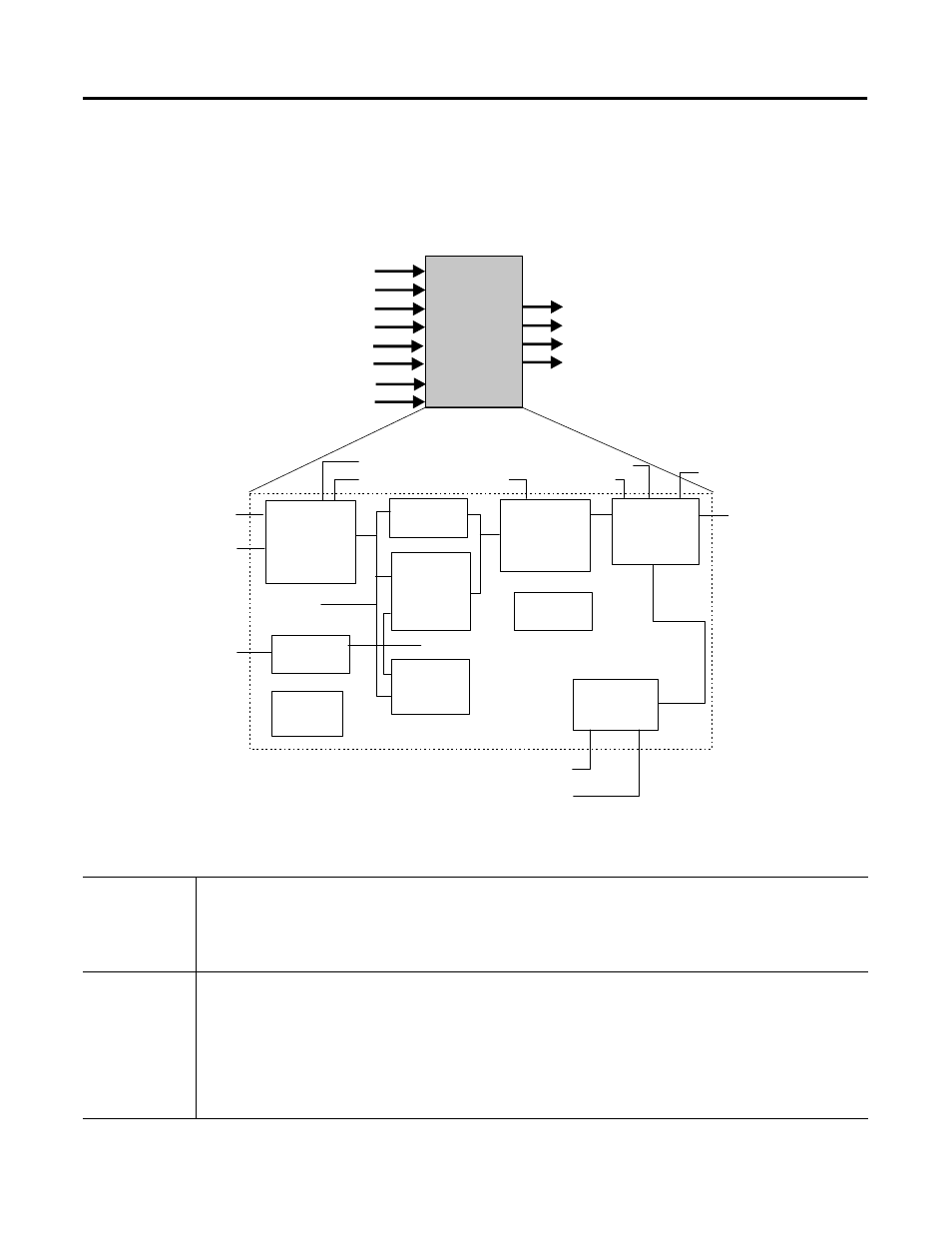
Proportional/Integral/Derivative Block
Figure 1.12 Functional Schematic for Porportional/Integral/Derivative Function
Block
Table 1.L Proportional/Integral/Derivative Block Specifications
Description
The Proportional/Integral/Derivative function block provides classic three-mode control function for closed-loop
control applications. When the Process Variable deviates from the Set point, the PID function acts upon the error to
move the output in a direction to correct the deviation. PID blocks support cascade applications to compensate for the
difference in process time constants of a primary and secondary process measurement. A functional schematic of the
block is shown in Figure 1.12 for reference.
Function Notes
• Supports Out of Service (OOS), Initialization Manual (IMan), Local Override (LO), Manual (Man), Automatic (Auto),
Cascade (Cas), Remote Cascade (RCas) and Remote-Out (ROut) modes.
• The input (IN) passes through a filter with a time constant (PV_FTIME). The filtered value becomes the Process
Variable (PV) to be used with the Set point (SP) in the block's algorithm. A PID algorithm will not integrate, if the
limit status of the input (IN) is constant.
• The full cascade SP sub-function is used, with rate and absolute limits. Additional control options are available to
have the SP value track the PV value, when the block's actual mode is IMan, LO, Man, or ROut. Limits do not cause
SP-PV tracking.
PID
OUT
Feed Forward
FF_SCALE
FF_GAIN
Output
OUT_HI_LIM
OUT_LO_LIM
OUT
Mode
SHED_OPT
SP
CAS_IN
RCAS_IN
BKCAL_OUT
RCAS_OUT
Setpoint
SP_RATE_DN
SP_RATE_UP
SP_HI_LIM
SP_LO_LIM
Output Track
TRK_SCALE
BKCAL_OUT
RCAS_OUT
CAS_IN
RCAS_IN
BKCAL_IN
TRK_IN_D
TRK_VAL
IN
IN
BKCAL_IN
TRK_VAL
ROUT_IN
TRK_IN_D
FF_VAL
ROUT_OUT
Bypass
BYPASS
Filter
PV_FTIME
Status
BKCAL_HYS
Control
GAIN
RESET
BAL_TIME
RATE
Alarm
HI/LO
DEV
ROUT_IN
ROUT_OUT
PV
FF_VAL