Rockwell Automation 23P PowerFlex Digital DC Drive User Manual
Page 222
222
Rockwell Automation Publication 20P-UM001K-EN-P - July 2014
Chapter 4
Troubleshooting
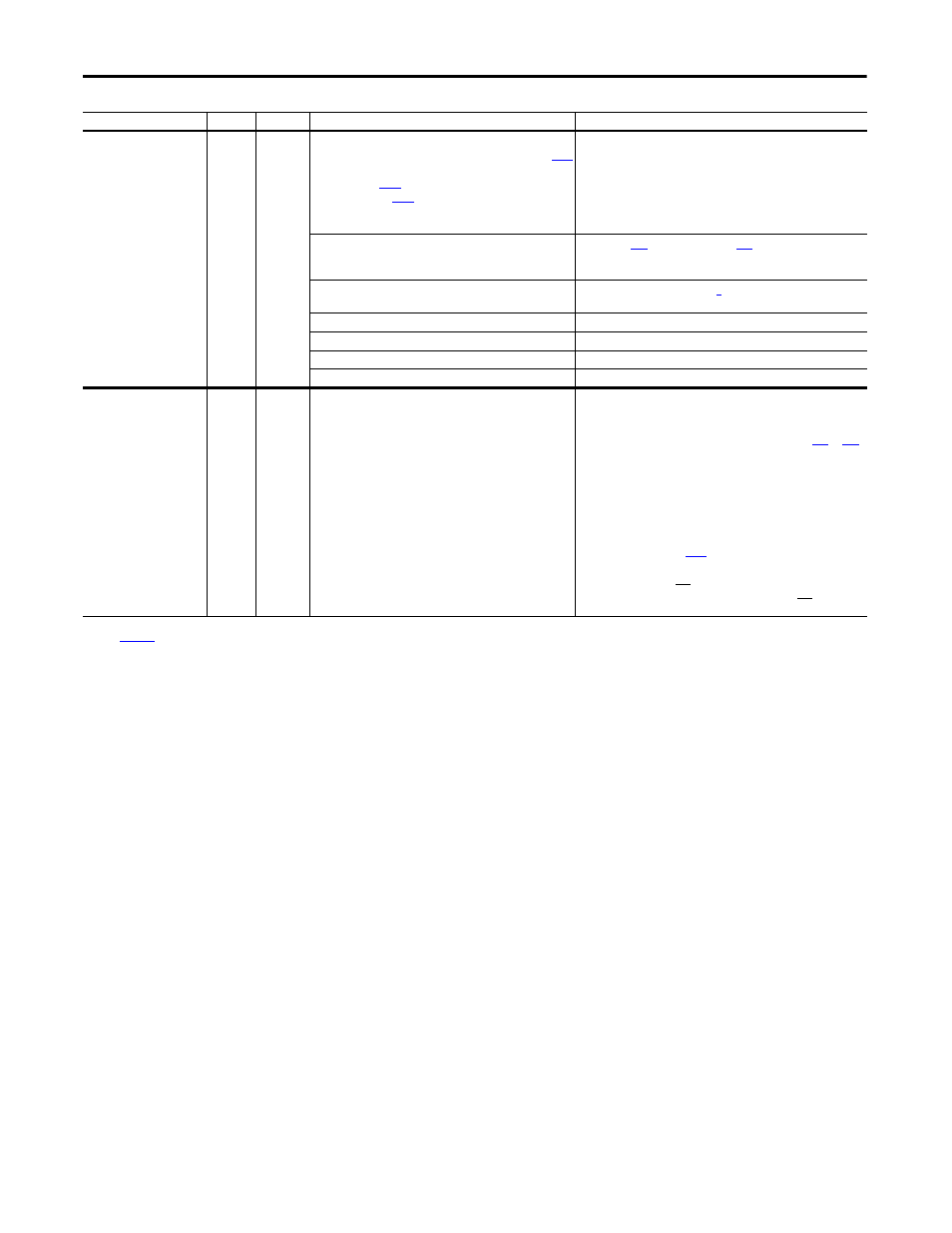
TorqPrv Spd Band
94
2
The difference between the commanded speed and the
encoder/resolver speed has exceeded the level set in Par
[Speed Dev Band] for a time period greater than that value
specified in Par
[Spd Band Intgrtr]. This fault is only
enabled when Par
[Torq Prove Cfg], bit 0 “TP Enable” is
set and causes the drive to coast to a stop. Possible causes
include:
• Speed loop tuning is not correct.
Increase Par
[Spd Reg BW] or Par
[Total Inertia]. Note that if
these values are set too high, the speed regulator will become
unstable.
• The drive is operating under a current limit.
Raise the current limit set in Par
[Current Limit]. Note that if this
value is set too high, a motor overload may occur.
• Drive acceleration/deceleration rates are too fast.
Reduce the acceleration/deceleration rates.
• The brake is not releasing.
Check brake wiring and operation.
• The motor field is not reaching the rated value.
Check that the motor field is wired and configured correctly.
• The drive is undersized.
Reduce the load.
Travel Lim Cflct
99
2
Travel limits are in conflict. Both the forward and reverse
travel limits indicate they are simultaneously active, causing a
drive current limit stop.
• If digital limits (hardware signals) are in use, verify that the
following forward and reverse digital input pairs are not both off
at the same time: fwd/rev decel travel limit digital inputs and
fwd/rev end stop travel limit digital inputs (see Pars
The travel limit digital inputs are meant to be connected to
normally closed switch contacts, so the digital input status will
read an off (0 = False) bit status when the machine is on limit
and the switch contact opens. A possible cause for this condition
is loss of common power to both the forward and reverse travel
limit switches.
• If software travel limits are in use, check the state of the fwd/rev
travel limit bits in Par
[Torq Prov Setup]. These bits are on
(1) when the machine is on limit. Bit 2 “Decel Fwd” and bit 4
“Decel Rev” should not be on at the same time. Similarly, Bit 3
“End Stop Fwd” and bit 5 “End Stop Rev” should
not
be on at the
same time.
(1) See
for a description of fault types.
Fault Name
Number Type
(1)
Description/Possible Cause(s)
Action(s)