Rockwell Automation 23P PowerFlex Digital DC Drive User Manual
Page 183
Rockwell Automation Publication 20P-UM001K-EN-P - July 2014
183
Programming and Parameters
Chapter 3
U
TIL
IT
Y
Al
arms
585
[Overspeed Val]
Speed value (rpm) at which an “Overspeed” fault (F25) will occur.
Notes: Typically set at 110% of Par 162 [Max Feedback Spd]. See Chapter 4 for a list
of fault and alarm descriptions. This parameter was added for firmware version
3.001.
Default:
Min/Max:
Units:
1925
0 / 7800
rpm
16-bit
Int
162
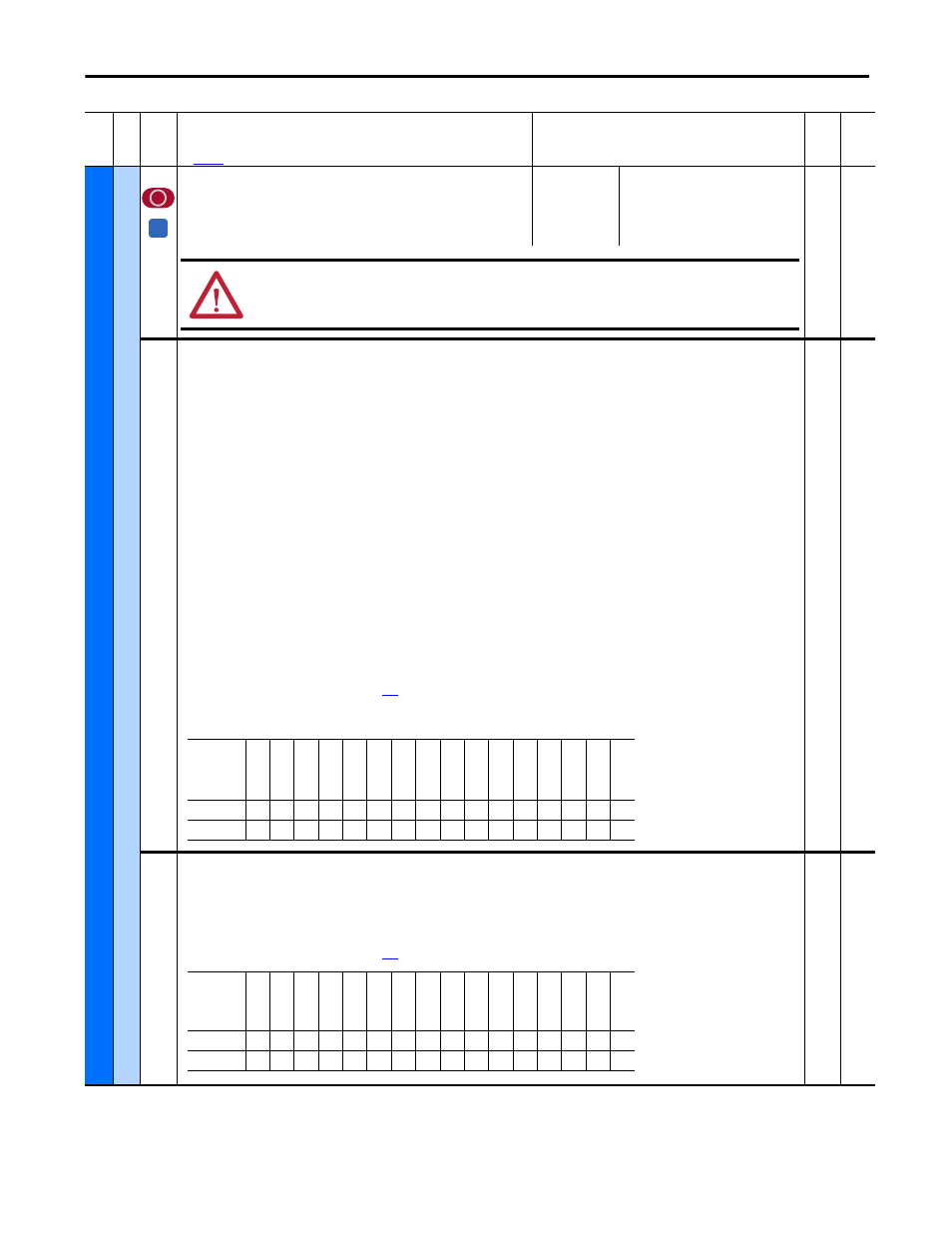
1380 [Drive Alarm 1]
Alarm conditions that currently exist in the drive. For each bit, 1 = condition true, and 0 = condition false.
Bit 0“DigInCflctA” - Digital input functions are in conflict.
Bit 1“DigInCflctB” - A digital Start input has been configured without a Stop input or other functions are in conflict.
Bit 2“DigInCflctC” - More than one physical input has been configured for the same input function.
Bit 3“BipolarCflct” - Parameter 1322 [Direction Mode] is set to “Bipolar” or “Reverse Dis” and one or more of the following digital input functions is
configured: “Fwd/Reverse,” “Run Forward,” “Run Reverse,” “Jog Forward” or “Jog Reverse.”
Bit 4“Ref Cflct” - Multiple speed or position references are configured.
Bit 5“CntactrCflct” - Contactor input functions are in conflict.
Bit 6“FB Cfg Cflct” - A speed feedback configuration error has occurred or is being provided by multiple sources.
Bit 7“Overvoltage” - There is an overvoltage on the armature circuit.
Bit 8“Over Temp” - The motor has exceeded its temperature rating [as signaled by the thermistor (PTC) or thermal switch connected to the drive
terminals 78 and 79].
Bit 9“Aux Input” - An auxiliary input interlock is open or a voltage (15…30 V) or reference signal is missing for the digital input set to 14 “Aux
Fault” (only updates if Par 354 [Aux Inp Flt Cfg] is set to 1 “Alarm”).
Bit 10“Field Loss” - The field current is too low.
Bit 11“SpdFdbk Loss” - The drive is not receiving a speed feedback signal.
Bit 12“PwrUp Start” - Indicates that the drive is starting or has automatically resumed running at commanded speed after drive input power was
restored.
Bit 13“Mtr Overload” - Indicates when the Motor Overload alarm level has been reached.
Bit 14“FldCfg Cflct” - Indicates a field configuration conflict.
Bit 15“Spd Fdbk Err” - Indicates an encoder or resolver error.
Notes: See Chapter 4 -Troubleshooting on page
for more information on faults/alarms. The name of bit 11 was changed from “Encoder Loss”
and bits 13 and 14 were added for firmware version 3.001. The name of bit 4 “AnalogCflct”, bit 6 “Encoder Cflct”, and bit 11 “Feedback Loss” were
changed and bit 15 was added for firmware version 5.002.
16-bit
Int
1322
1394 [Drive Alarm 2]
Alarm conditions that currently exist in the drive. For each bit, 1 = condition true, and 0 = condition false.
Bit 0“BrakeSlipped” - The torque prove function encountered a brake slip condition.
Bit 1“TrqProvCflct” - The torque prove function is not properly configured.
Bit 2“TP Encls Cfg” - The torque prove function encountered an encoderless configuration conflict.
Bit 3“OpenSCR Trip” - An open SCR trip level has been reached.
Notes: See Chapter 4 -Troubleshooting on page
for more information on faults/alarms. This parameter was added for firmware version 6.001.
16-bit
Int
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 114
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
ATTENTION: Verify that you have correctly set this parameter appropriately for your application. Incorrectly setting this
parameter may cause a hazard of personal injury and/or equipment damage.
Options
Sp
d F
dbk
Err
Fl
dC
fg
C
flc
t
Mtr O
ver
lo
ad
Pw
rU
p S
tar
t
Sp
dF
db
k L
oss
Fi
el
d L
os
s
Au
x Inpu
t
Ov
er
Te
m
p
Ov
er
vo
lt
ag
e
FB C
fg
Cfl
ct
Cntac
trCflc
t
Re
f Cflc
t
Bi
polarCflc
t
D
igIn
Cfl
ctC
D
igIn
Cfl
ctB
D
igIn
Cfl
ctA
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
Options
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Op
en
SC
R T
rip
TP E
ncls
Cfg
Tr
qP
ro
vC
flc
t
Br
ak
eSl
ip
ped
Default
x
x
x
x
x
x
x
x
x
x
x
x
0
0
0
0
Bit
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0