Rockwell Automation 23P PowerFlex Digital DC Drive User Manual
Page 133
Rockwell Automation Publication 20P-UM001K-EN-P - July 2014
133
Programming and Parameters
Chapter 3
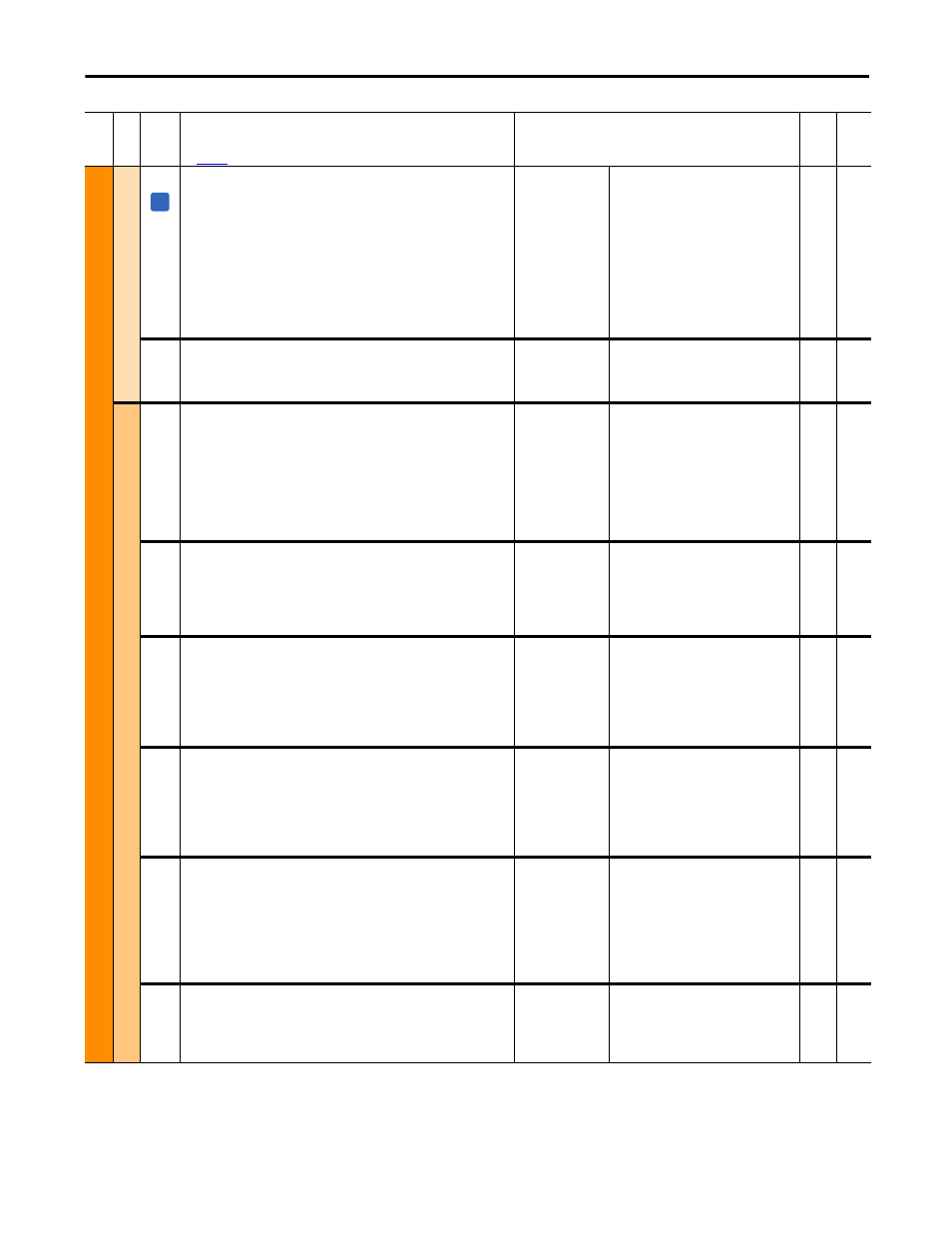
M
O
TO
R C
O
NTRO
L
Fi
el
d Co
n
fi
g
921
[Out Volt Level]
The percentage of maximum output voltage based on the value in Par 175
[Rated Motor Volt]. In regenerative, field-weakened applications (hoist,
elevator, unwinder, etc.) set the value of this parameter less than 100%, to
allow operation when overcoming gravity. The value of this parameter also
determines the voltage where the drive begins field de-fluxing while Field
Weaken mode is active (Par 469 [Field Mode Sel] = “Field Weaken”). Leave
set to the default value for permanent magnet motor applications.
Notes: This parameter can be assigned to an analog output or analog input
(by selecting “Out Volt Lvl”). The maximum value of this parameter was
changed from “100” for firmware version 3.001.
Default:
Min/Max:
Units:
100.0
0.0 / 110.0
%
Real
469
1407
[Field Econ Delay]
Amount of time to elapse once the drive reaches zero speed (as determined
by Par 107 [Speed Zero Level]) before field economy becomes active. Leave
set to the default value for permanent magnet motor applications.
Default:
Min/Max:
Units:
300
0 / 1800
s
16-bit
Int
107,
499
To
rq
A
tt
ribu
tes
7
[Current Limit]
Symmetrical current limit expressed as a percentage of the value in Par 179
[Nom Mtr Arm Amps]. This value applies to both current directions for four
quadrant drives.
• If Par 7 [Current Limit] is changed, Pars 8 [Current Lim Pos] and 9 [Current
Lim Neg] are set to the same value. If either the value of Pars 8 [Current
Lim Pos] or 9 [Current Lim Neg] is changed later, the last change is valid.
Note: The maximum value for this parameter has been changed from 200%
to 250% for firmware version 5.006.
Default:
Min/Max:
Units:
150
0 / 250
%
16-bit
Int
8,
9,
179
8
[Current Lim Pos]
The drive current limit for the positive current direction expressed as a
percentage of the value in Par 179 [Nom Mtr Arm Amps].
Notes: This parameter can be assigned to an analog input. The maximum
value for this parameter has been changed from 200% to 250% for firmware
version 5.006.
Default:
Min/Max:
Units:
150
0 / 250
%
Real
7
9
[Current Lim Neg]
The drive current limit for the negative current direction expressed as a
percentage of the value in Par 179 [Nom Mtr Arm Amps]. This parameter is
not active for two quadrant drives.
Notes: This parameter can be assigned to an analog input. The maximum
value for this parameter has been changed from 200% to 250% for firmware
version 5.006.
Default:
Min/Max:
Units:
150
0 / 250
%
Real
7
12
[Current Rate Lim]
Specifies the largest change in armature current reference that will be
allowed per current loop scan (2.7 ms @ 60Hz, 3.3 ms @ 50Hz AC line
frequency). A value of 100% indicates that the armature current reference
will not be permitted to change by more than rated motor current in a given
speed loop scan period.
Note: This parameter was added for firmware version 5.002.
Default:
Min/Max:
Units:
25
0.1 / 250
%
Real
39
[Torque Ref]
First current reference value, before any trim signals are incorporated, as a
percentage of the value set in Par 179 [Nom Mtr Arm Amps]. For firmware
version 2.005 or lower, this parameter is only used when Par 242 [Speed Reg
En] = 0 “Disabled”.
Note: The current reference value is proportional to the armature current of
the motor and determines the torque. The polarity determines the torque
direction.
Default:
Min/Max:
Units:
0
– / +200
%
Real
40
[Trim Torque]
Second current reference value as a percentage of the value set in Par 179
[Nom Mtr Arm Amps]. [Trim Torque] is added to Torque Reference and can be
used as a correction value for the torque reference (regardless of the value of
Par 242 [Speed Reg En]).
Default:
Min/Max:
Units:
0
– / +200
%
Real
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 114
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A