Rockwell Automation 23P PowerFlex Digital DC Drive User Manual
Page 154
154
Rockwell Automation Publication 20P-UM001K-EN-P - July 2014
Chapter 3
Programming and Parameters
DYNAMIC C
O
NTROL
Lo
ad Limits
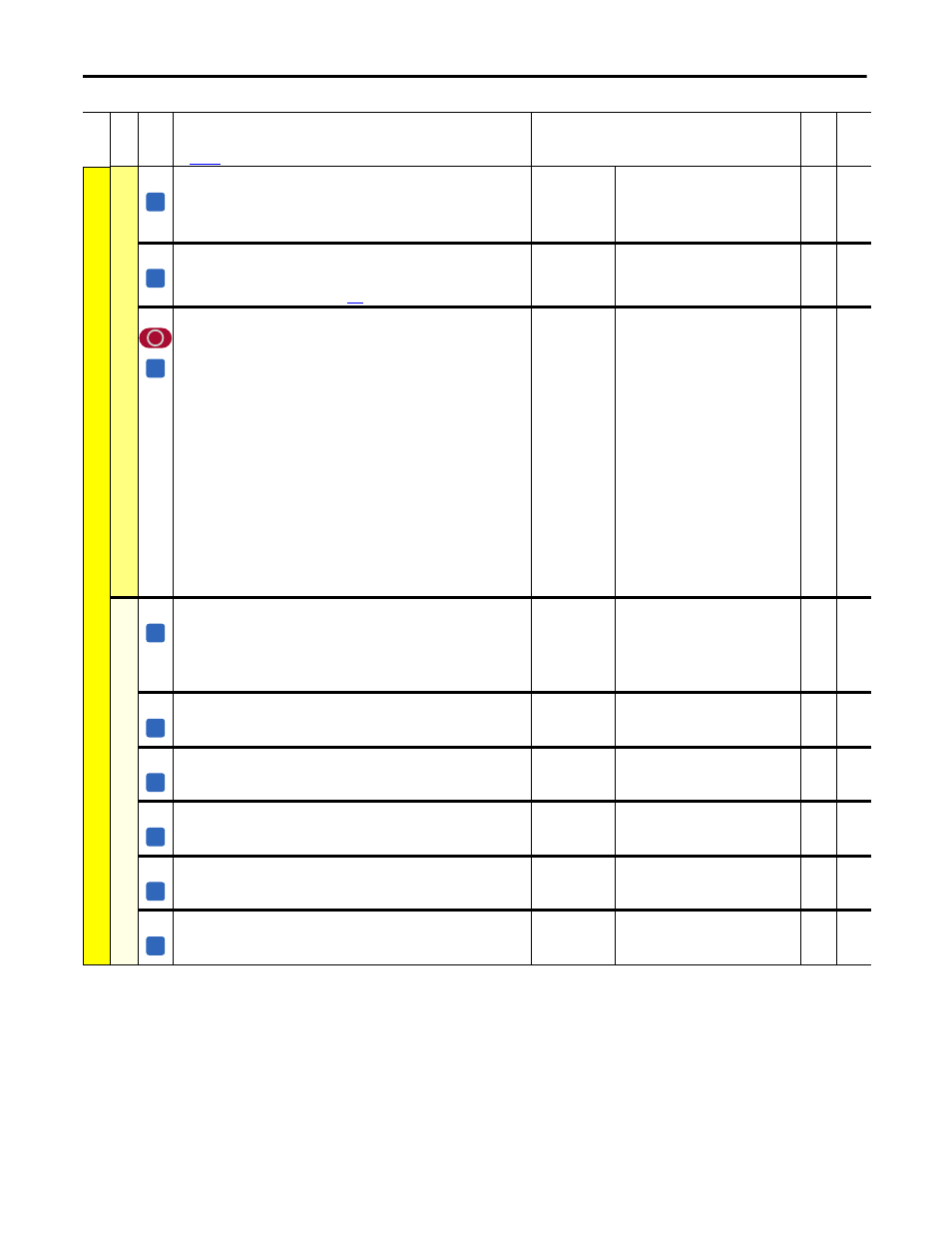
699
[Enable Droop]
Enables/Disables the Droop function.
• “Enabled” = The Droop function is enabled.
• “Disabled” = The Droop function is disabled.
Note: This parameter can be assigned to a digital input.
Default:
Options:
0 =
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
16-bit
Int
700
[Droop Limit]
The speed reference correction range within which the droop function becomes
active.
Note: See Droop Compensation on page
for more information.
Default:
Min/Max:
Units:
1750
0 / Par 45 [Max Ref Speed]
rpm
16-bit
Int
715
[Torq Limit Type]
This parameter determines the response of the drive during a current limiting
condition.
• “T Lim PosNeg” = The active positive torque limit is set by the value defined in
Par 7 [Current Limit] and the active negative torque limit is set by the value
defined in Par 9 [Current Lim Neg].
• “T Lim MtrGen” = With this option the following three conditions apply:
1. If the motor speed is greater than +1% of Par 162 [Max Feedback Spd], the
active positive torque limit is set by the value defined in Par 8 [Current Lim
Pos] and the active negative torque limit is set by the value defined in Par 9
[Current Lim Neg].
2. If the motor speed is less than –1% of Par 162 [Max Feedback Spd] the
active positive torque limit is set by the value defined in Par 9 [Current Lim
Neg] and the active negative torque limit is set by the value defined in Par 8
[Current Lim Pos].
3. If the motor speed is greater than –1% of Par 162 [Max Feedback Spd] and
less than +1% of Par 162 [Max Feedback Spd] the active positive and
negative torque limits are set by the value defined in Par 8 [Current Lim Pos].
Note: The option names were corrected to those shown above for firmware version
4.001.
Default:
Options:
0 =
0 =
1 =
“T Lim PosNeg”
“T Lim PosNeg”
“T Lim MtrGen”
16-bit
Int
7,
8,
9,
162
St
op
M
od
es
38
[Fast Stop Time]
The amount of time to decelerate the drive to a complete stop and disable the
drive. The deceleration rate for Fast stop = [Maximum Speed] / [Fast Stop Time].
This feature can be used when [Digital Inx Sel] is set to 30 “Fast Stop” or when
certain alarms are configured for “Fast Stop”. See Pars 354 [Aux Inp Flt Cfg] and 365
[OverTemp Flt Cfg].
Default:
Min/Max:
Units:
10
0 / 65535
s
16-bit
Int
354,
365
627
[Spd 0 Trip Delay]
The amount of time that will elapse after the drive reaches zero speed before it is
disabled.
Default:
Min/Max:
Units:
0
0 / 40000
ms
16-bit
Int
1262 [Closing Speed]
Motor speed at which the brake is closed. Used with External Brake Control.
Default:
Min/Max:
Units:
30
0 / 200
rpm
16-bit
Int
1263 [Opening Delay]
Amount of time before the brake will open after the drive has been enabled. Used
with External Brake Control.
Default:
Min/Max:
Units:
0
0 / 30000
ms
16-bit
Int
1265 [Ramp In Zero En]
Enables/Disables the setting of the ramp input to zero. Used with External Brake
Control.
Default:
Options:
0 =
0 =
1 =
“Disabled”
“Disabled”
“Enabled”
16-bit
Int
1266 [Actuator Delay]
Amount of time before the actuator releases the load. Used with External Brake
Control.
Default:
Min/Max:
Units:
0
0 / 30000
ms
16-bit
Int
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 114
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
A
A
A
A
A
A
A
A