Rockwell Automation 23P PowerFlex Digital DC Drive User Manual
Page 221
Rockwell Automation Publication 20P-UM001K-EN-P - July 2014
221
Troubleshooting
Chapter 4
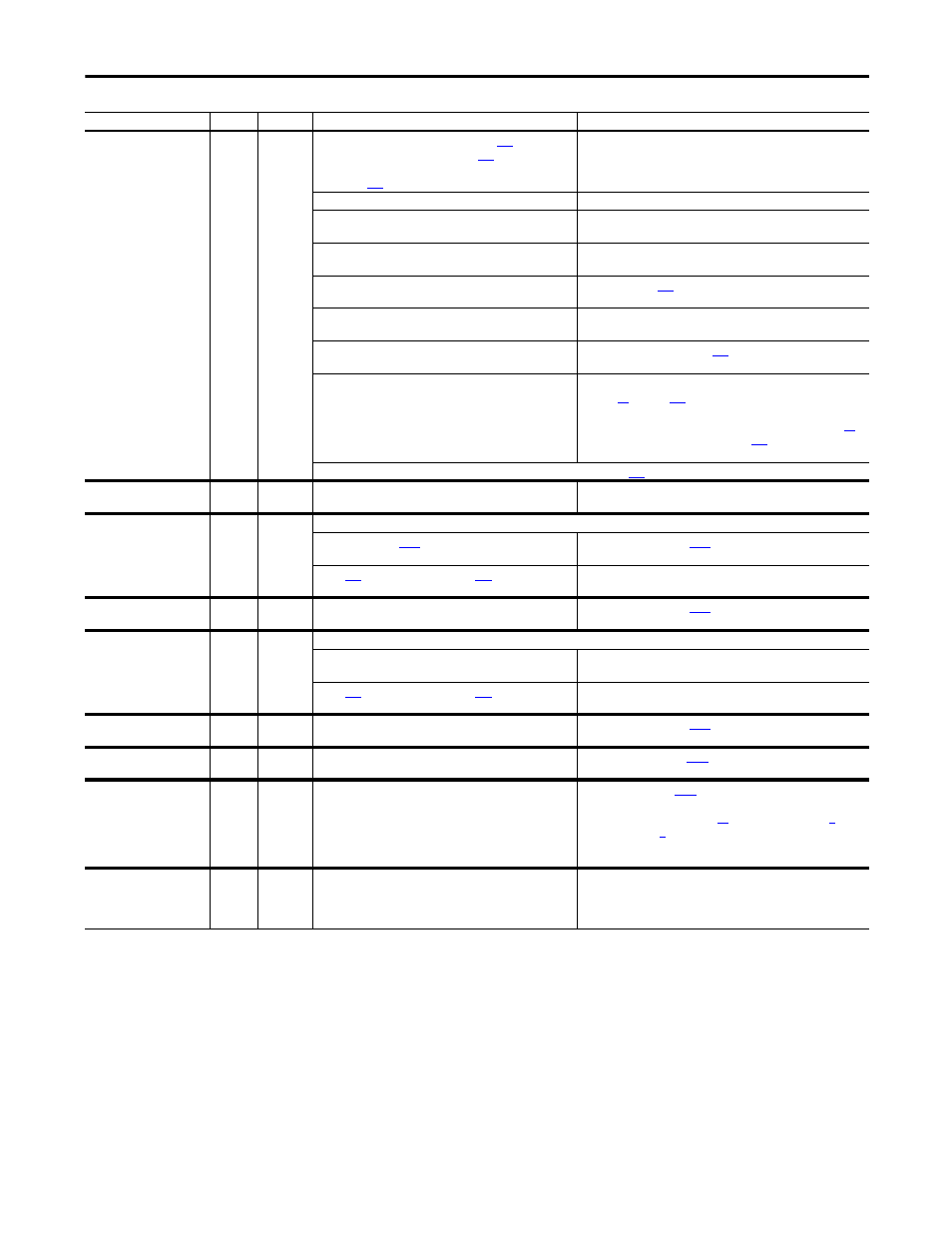
Spd Fdbk Loss
91
1
The speed feedback device selected by Par
[Fdbk Device
Type] is indicating less than 5% of Par
[Max Feedback
Spd] while the measured armature voltage is greater than the
value of Par
[Spd FB Loss Lvl].
Possible causes include:
• The conductors of the feedback signal have been
interrupted.
Current from one or more of the feedback device wires is not
reaching the drive. Check the feedback device wiring.
• One or several encoder/resolver channels are missing
(conductor interruption, no power supply).
Check the encoder/resolver connections and power supply.
• The motor voltage is incorrect.
1. Verify that Par
[Rated Motor Volt] is set correctly
2. Tune the motor.
• The ramp rate is too fast for the connected load.
1. Reduce the load.
2. Reduce the ramp rate.
• Field Weakening is set incorrectly.
Verify the that the value of Par
[Fld Weaken Ratio] is set
properly.
The encoder or resolver configuration is incorrect.
1. For encoder feedback, verify the setting of DIP switch S20 (see
) and Par
[Encoder Err Chk].
2. Verify that the connected encoder is capable of the input and
output voltage as determined by DIP switch S21 (see page
).
3. For resolver feedback, verify that Par
[Resolver Status] is not
indicating any errors.
Note: This fault condition can be configured to produce an alarm with Par
[Spd Loss Flt Cfg].
STune Aborted
62
2
The speed regulator auto tuning procedure has been stopped
by the user.
Informational only.
STune CurLimit
59
2
One of the following has occurred:
• The value of Par
[Autotune Cur Lim] for auto tuning
the speed regulator is set too high.
Decrease the value of Par
[Autotune Cur Lim] and repeat the
auto tune procedure.
• Par
[Speed Zero Level] and/or
[Speed Zero Delay]
is set too high.
Set Pars 107 and 108 to their default values when performing the
Speed Loop Autotuning function.
STune FrictionLo
60
2
The friction value attained during the auto tuning procedure
is zero or lower than the control precision limit.
Decrease the value of Par
[Autotune Cur Lim] and repeat the
auto tune procedure.
STune LoadHi
58
2
One of the following has occurred:
• The loading torque value is too high at zero speed to
complete the speed regulator auto tuning procedure.
Decrease the load torque, where applicable, and repeat the auto
tune procedure.
• Par
[Speed Zero Level] and/or
[Speed Zero Delay]
is set too high.
Set Pars 107 and 108 to their default values when performing the
Speed Loop Autotuning function.
STune Overspeed
56
2
The measured motor speed is too high during the speed
regulator auto tuning procedure.
Decrease the value of Par
[Autotune Cur Lim] and repeat the
auto tune procedure.
STune Stalled
57
2
The drive stalled during the speed regulator auto tuning
procedure.
Increase the value of Par
[Autotune Cur Lim] and repeat the
auto tune procedure.
STune Timeout
61
2
The speed regulator auto tuning procedure did not complete
within the available time or the current regulator auto tuning
procedure did not complete within 15 minutes.
Verify the value in Par
[Autotune Cur Lim]. If this value is set to
low, the motor will not be able to reach a maximum speed of 33%
of the lower of the values in Par
[Max
Speed Fwd] or Par
[Max Speed Rev] and not be able to complete
the test. Set these values appropriately and repeat the auto tuning
procedure.
Sustained Curr
70
2
One of the following has occurred:
• The motor CEMF is too high or the line voltage is too low
• A current bridge change command has not completed
within 1 second
• Check the line voltage and frequency.
• Check the motor brushes and connections.
• Check the main and DB contactor connections if present.
• Verify that there are no overhauling loads present.
Fault Name
Number Type
(1)
Description/Possible Cause(s)
Action(s)