Rockwell Automation 23P PowerFlex Digital DC Drive User Manual
Page 170
170
Rockwell Automation Publication 20P-UM001K-EN-P - July 2014
Chapter 3
Programming and Parameters
AP
PLIC
AT
IO
NS
To
rq
u
e P
ro
ve
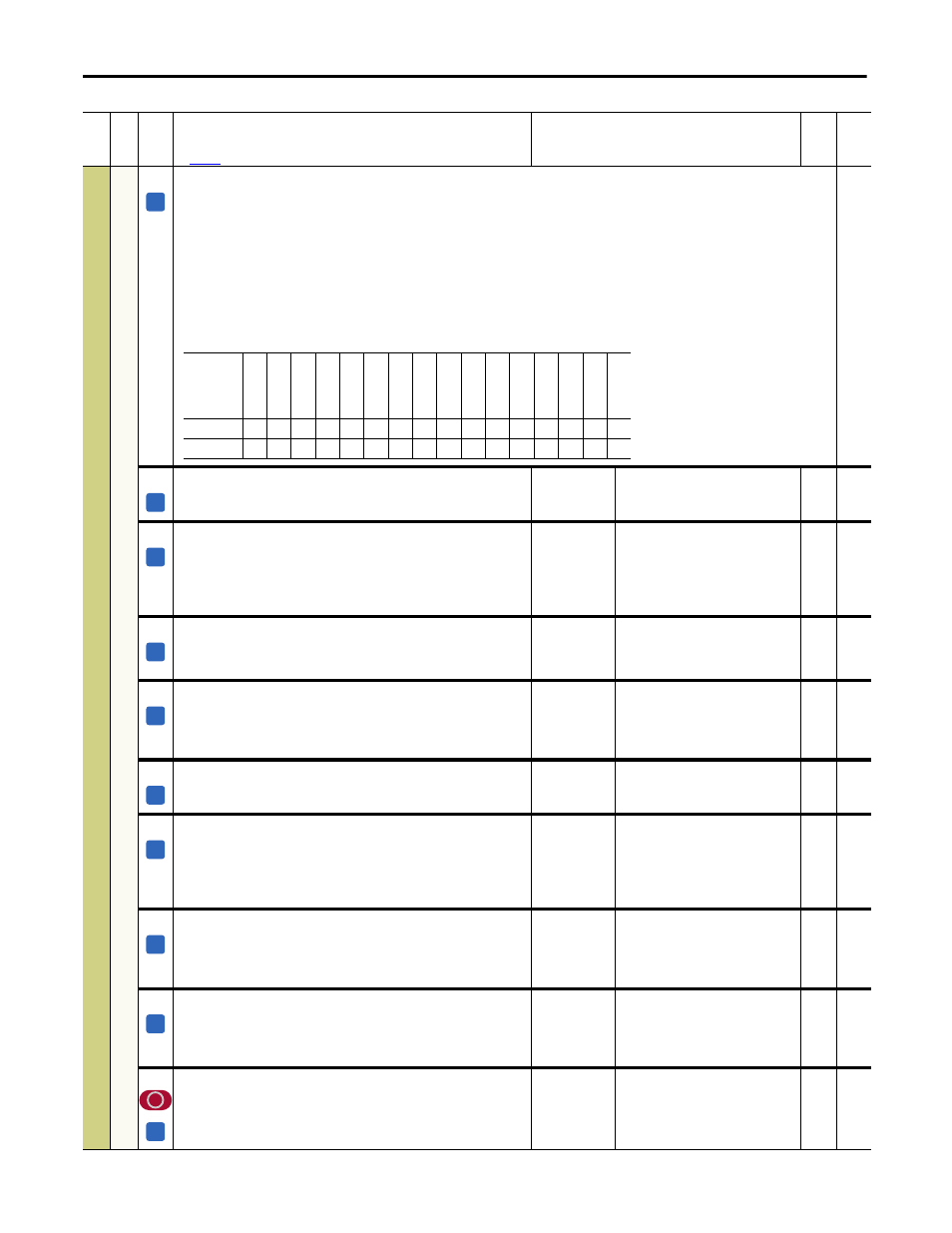
1103 [Torq Prove Sts]
Status of the Torque Proving functions.
Bit 0 “EndLimitActv” - When set to “1,” indicates that an end (forward or reverse) travel limit condition active.
Bit 1 “DecelLmtActv” - When set to “1,” indicates that a deceleration (forward or reverse) travel limit condition active.
Bit 2 “Micro Psn” - When set to “1,” indicates that a micro position condition active.
Bit 3 “BrkSlip1 Alm” - When set to “1,” indicates a brake slippage signal has been detected.
Bit 4 “Brake Set” - When set to “1,” indicates a brake set signal has been detected.
Bit 5 “LoadTestActv” - When set to “1,” indicates that a test for load above base speed operation is active.
Bit 6 “RefLoadLmted” - When set to “1,” indicates that the speed reference is limited due to load test results.
Bit 7 “Encoderless” - When set to “1,” indicates that encoderless torque proving mode is active.
Note: This parameter was added for firmware version 6.001.
1101
1104 [Torq Limit Slew]
Rate at which to ramp the torque limits to zero during brake proving.
Note: This parameter was added for firmware version 6.001.
Default:
Min/Max:
Units:
10.0
0.5 / 300.0
s
Real
1105 [Speed Dev Band]
Acceptable amount of deviation between the commanded speed and the actual
speed (from a feedback device) when torque proving is enabled. When this value is
exceeded for the time specified in Par 1106 [SpdBand Intgrtr], a “TorqPrv Spd
Band” (F94) fault occurs.
Note: This parameter was added for firmware version 6.001.
Default:
Min/Max:
Units:
Par 162 [Max Feedback Spd] x 0.03
Par 162 x 0.002 / Par 162 x 0.25
rpm
Real
162,
1106
1106 [Spd Band Intgrtr]
Amount of time that the actual speed can deviate from the value set in Par 1105
[Speed Dev Band] before a “TorqPrv Spd Band” (F94) fault occurs.
Note: This parameter was added for firmware version 6.001.
Default:
Min/Max:
Units:
60
1 / 500
ms
16-bit
Int
1105
1107 [Brk Release Time]
Amount of time between the brake release command and when the drive begins
to accelerate. In encoderless mode, this parameter sets the time to release the
brake after the drive starts. Note: This parameter was added for firmware version
6.001.
Default:
Min/Max:
Units:
100
0 / 1000
ms
16-bit
Int
1108 [Brk Set Time]
Amount of time between the brake set command and when the start of brake
proving. Note: This parameter was added for firmware version 6.001.
Default:
Min/Max:
Units:
100
0 / 1000
ms
16-bit
Int
1109 [Brk Alarm Travel]
Number of motor shaft revolutions allowed during the brake slippage test. Drive
torque is reduced to check for brake slippage. When slippage occurs, the drive
allows this number of motor shaft revolutions before regaining control. This
parameter value is not used when Par 1100 [Torq Prove Cfg], Bit 1 “Encoderless” is
set to “1” (enabled). Note: This parameter was added for firmware version 6.001.
Default:
Min/Max:
1.00
0.00 / 1000.00
Real
1100
1110 [Brk Slip Count]
Number of encoder/resolver revolutions that define a brake slippage condition.
This parameter value is not used when Par 1100 [Torq Prove Cfg], Bit 1
“Encoderless” is set to “1” (enabled). Note: This parameter was added for firmware
version 6.001.
Default:
Min/Max:
0.25
0.00 / 100.00
Real
1100
1111 [Float Tolerance]
Speed at which the float time (set in Par 1113 [ZeroSpdFloatTime]) starts. Also, the
speed at or below which the brake is closed when Par 1100 [Torq Prove Cfg], Bit 1
“Encoderless” is set to “1” (enabled). Note: This parameter was added for firmware
version 6.001.
Default:
Min/Max:
Units:
Par 162 [Max Feedback Spd] x 0.03
Par 162 x 0.002 / Par 162 x 0.25
rpm
Real
162,
1100
1112 [MicroPsnScalePct]
Percent of the commanded speed reference used when bit 2 “Micro Psn” is set to
“1” in Par 1100 [Torq Prove Cfg]. Bit 2 “Micro Psn,” also determines if the motor
needs to come to a stop before the setting in this parameter will take effect.
Note: This parameter was added for firmware version 6.001.
Default:
Min/Max:
Units:
10.0
0.1 / 100.0
%
Real
1100
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 114
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
Options
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
Res
er
ved
En
cod
er
less
RefL
oadL
mt
ed
Lo
ad
Te
st
Ac
tv
Brak
e S
et
Br
kSli
p1 A
lm
Micr
o P
sn
Dec
el
Lm
tA
ct
v
End
Lim
itA
ct
v
Default
x
x
x
x
x
x
x
x
0
0
0
0
0
0
0
0
Bit
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
A
A
A
A
A
A
A
A
A