Rockwell Automation 23P PowerFlex Digital DC Drive User Manual
Page 169
Rockwell Automation Publication 20P-UM001K-EN-P - July 2014
169
Programming and Parameters
Chapter 3
AP
PLIC
AT
IO
NS
To
rq
u
e P
ro
ve
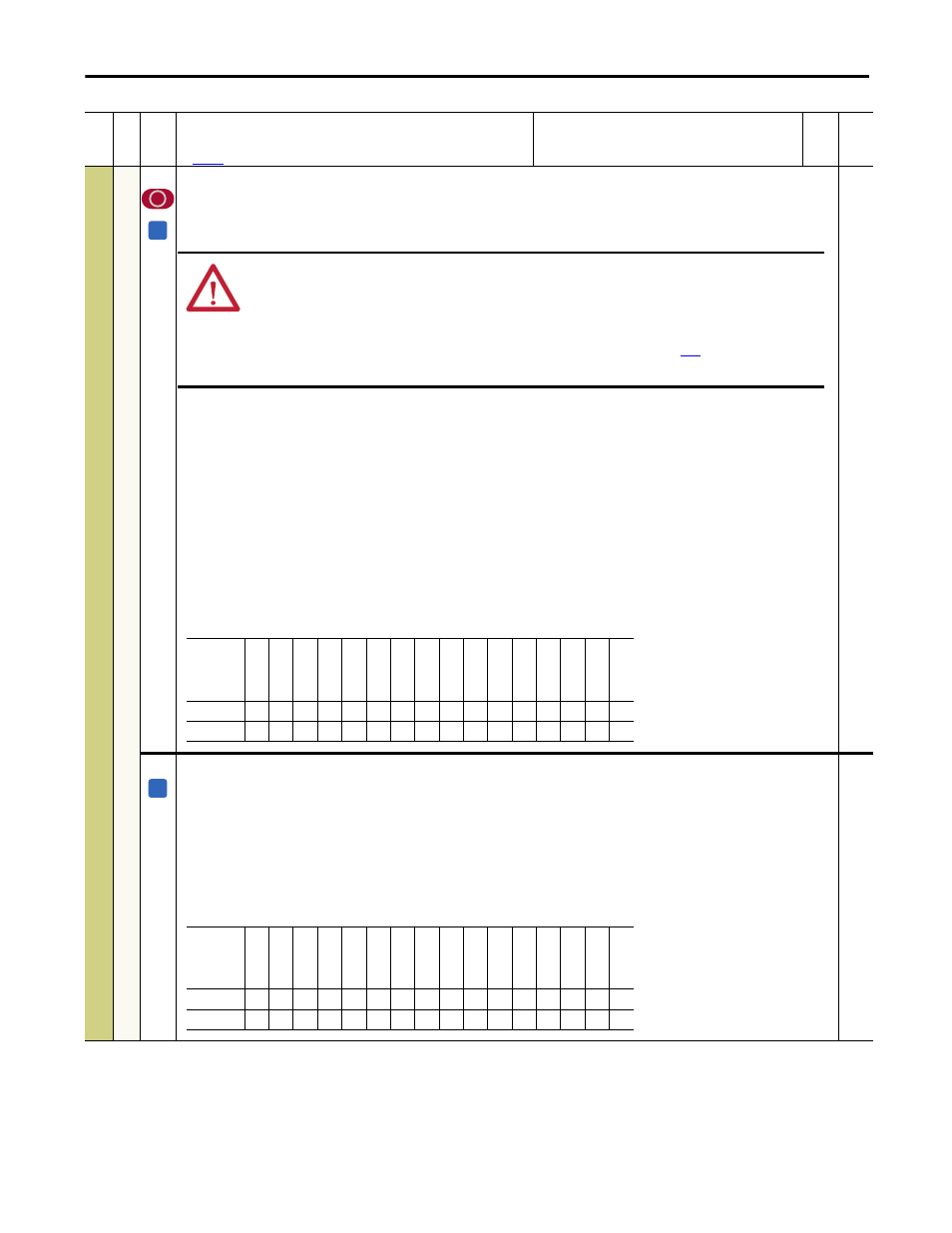
1100 [Torq Prove Cfg]
Enables/Disables the torque/brake proving feature. When this feature is enabled, brake control comes from a digital output relay set to “Brake Set.”
• Bit 0 “TP Enable” - When set to “1,” the torque/brake proving features are enabled (regenerative drives only, non-regen. drives results in a type 2 alarm).
• Bit 1 “Encoderless” - When set to “1,” enables encoderless operation. Bit 0 “TP Enable” must also be enabled and Par 414 [Fdbk Device Type] must be set
to 2 “DC Tach” or a type 2 alarm is generated.
• Bit 2 “Micro Psn” - When set to “0,” micro positioning only activates in float zone. When set to “1” micro positioning activates whenever a digital input
configured for “Micro Positioning” or Par 1101 [Torq Prove Setup], bit 1 “Float Micro” is asserted.
• Bit 3 “Preload” - When set to “0,” the drive uses the last holding torque reference for preload. When set to “1,” the drive uses “TorqRefA” if the
commanded direction is forward and “TorqRef B” if the commanded direction is reverse.
• Bit 4 “FW LoadLimit” - When set to “1,” enables a load calculation at base speed. The drive will then limit the maximum speed above base speed. Torque
samples are taken every 2.5 seconds to hold the load at base speed and calculates (based on motor characteristics and measured torque) the maximum
speed that holds the load. This feature limits the commanded speed if it is greater than what the motor/drive can hold. The limit remains in effect until
the speed drops below base speed and a new test is activated.
• Bit 5 “BrkSlipEncls” - When set to “1,” disables the partial brake slip routine when bit 1 “Encoderless” is set to 1.
• Bit 6 “BrkSlipStart” - When set to “1,” automatically starts the drive if brake slippage is detected.
• Bit 7 “Test Brake” - When set to “1,” the brake is tested at a start command. The torque value set in Par 1114 [Brake Test Torq] is applied against the
brake while movement is monitored.
• Bit 8 “Lift Stop Bk” - When set to “1,” the brake is set immediately upon receiving a “Lift Stop” input, rather than setting the brake after the ramp
completes.
• Bit 9 “BkSlp SpdLmt” - When set to “1,” the load is lowered at a fixed speed (Preset Speed 1) when a brake slip condition is detected.
Note: This parameter was added for firmware version 6.001.
1101 [Torq Prove Setup]
Lets you control specific torque proving functions through a communications device (rather than digital inputs).
• Bit 0 “Lift Stop” - When set to “1,” initiates a current limit stop.
• Bit 1 “Float Micro” - When set to “1,” activates the micro position function when the drive is running and Float when the drive is stopping.
• Bit 2 “Decel Fwd” - When set to “1,” initiates a deceleration forward travel limit condition.
• Bit 3 “End Stop Fwd” - When set to “1,” initiates an end forward travel limit condition.
• Bit 4 “Decel Rev” - When set to “1,” initiates a deceleration reverse travel limit condition.
• Bit 5 “End Stop Rev” - When set to “1,” initiates an end reverse travel limit condition.
• Bit 6 “PHdwrOvrTrvl” - When set to “1,” initiates a positive hardware over travel limit: coast to stop fault.
• Bit 7 “NHdwrOvrTrvl” - When set to “1,” initiates a negative hardware over travel limit: coast to stop fault.
Note: This parameter was added for firmware version 6.001.
Fil
e
Gr
oup
No
.
Parameter Name & Description
See
page 114
for symbol descriptions
Values
Da
ta
T
yp
e
Rela
ted
A
ATTENTION: Encoderless TorqProve must be limited to lifting applications where personal safety is not a
concern. Encoders offer additional protection and must be used where personal safety is a concern.
Encoderless TorqProve cannot hold a load at zero speed without a mechanical brake and does not offer
additional protection if the brake slips/fails. Loss of control in suspended load applications can cause
personal injury and/or equipment damage. See Lifting/Torque Proving on page
for more
information.
Options
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
BkSlp Sp
dLm
t
Li
ft S
top
Bk
Te
st
B
ra
ke
Br
kSli
pSt
ar
t
Br
kSli
pEn
cl
s
FW L
oadLimit
Pr
el
oa
d
Micr
o P
sn
Encoder
less
TP E
nable
Default
x
x
x
x
x
x
0
0
0
0
0
0
0
0
0
0
Bit
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0
A
Options
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
NHdwrO
vr
Tr
vl
PH
dwrO
vr
Tr
vl
En
d Sto
p
Re
v
Dec
el
Rev
En
d Sto
p
Fw
d
Dec
el
F
w
d
Fl
oa
t M
ic
ro
Li
ft
Stop
Default
x
x
x
x
x
x
x
x
0
0
0
0
0
0
0
0
Bit
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
0