Appendix, Sensor position accuracy of avt cameras, Chapter – ALLIED Vision Technologies Guppy F-503 User Manual
Page 285: Sensor position accuracy of avt cam, Eras, Pr el im ina ry
Appendix
GUPPY Technical Manual V7.1.0
285
PR
EL
IM
INA
RY
Appendix
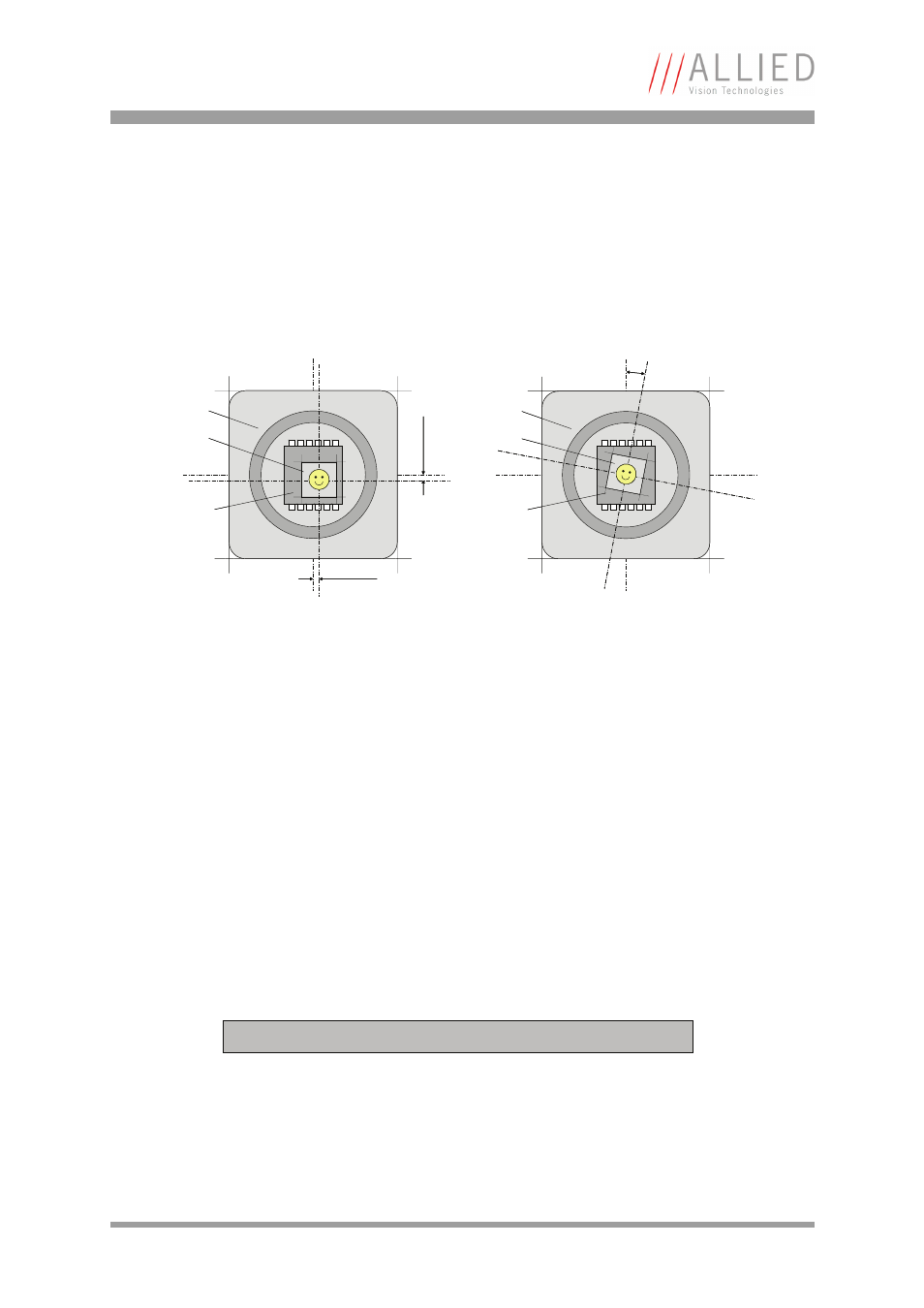
Sensor position accuracy of AVT cameras
Figure 122: AVT sensor position accuracy
x
y
camera body
sensor case
pixel area
x
y
camera body
sensor case
pixel area
sensor case
D
camera body
pixel area
sensor case
D
camera body
pixel area
AVT Guppy Series
Method of Positioning:
Automated mechanical alignment of sensor into camera front module.
(lens mount front flange)
Reference points:
Sensor: Center of pixel area (photo sensitive cells).
Camera: Center of camera front flange (outer case edges).
Accuracy: x/y:
+/- 0.25mm
(Sensor
shift)
z:
+50 / -100μm
(for SN > 84254727, optical back focal length)
+0 / -100μm
(for SN > 252138124, optical back focal length)
D:
+/- 1°
(Sensor rotation)
AVT Marlin, Oscar, Dolphin, Pike, Stingray
Method of Positioning:
Optical alignment of photo sensitive sensor area into camera front module.
(lens mount front flange)
Reference points:
Sensor: Center of pixel area (photo sensitive cells).
Camera: Center of camera front flange (outer case edges).
Accuracy:
x/y:
+/- 0.1mm
(Sensor shift)
z:
+0 / -50μm
(Optical back focal length)
D:
+/- 0.5°
(Sensor rotation)
Note: x/y - tolerances between c-Mount hole and pixel area may be higher.