Toshiba VF-FS1 User Manual
Page 139
E6581381
F-43
6
H
(P-gain adjustment parameter)
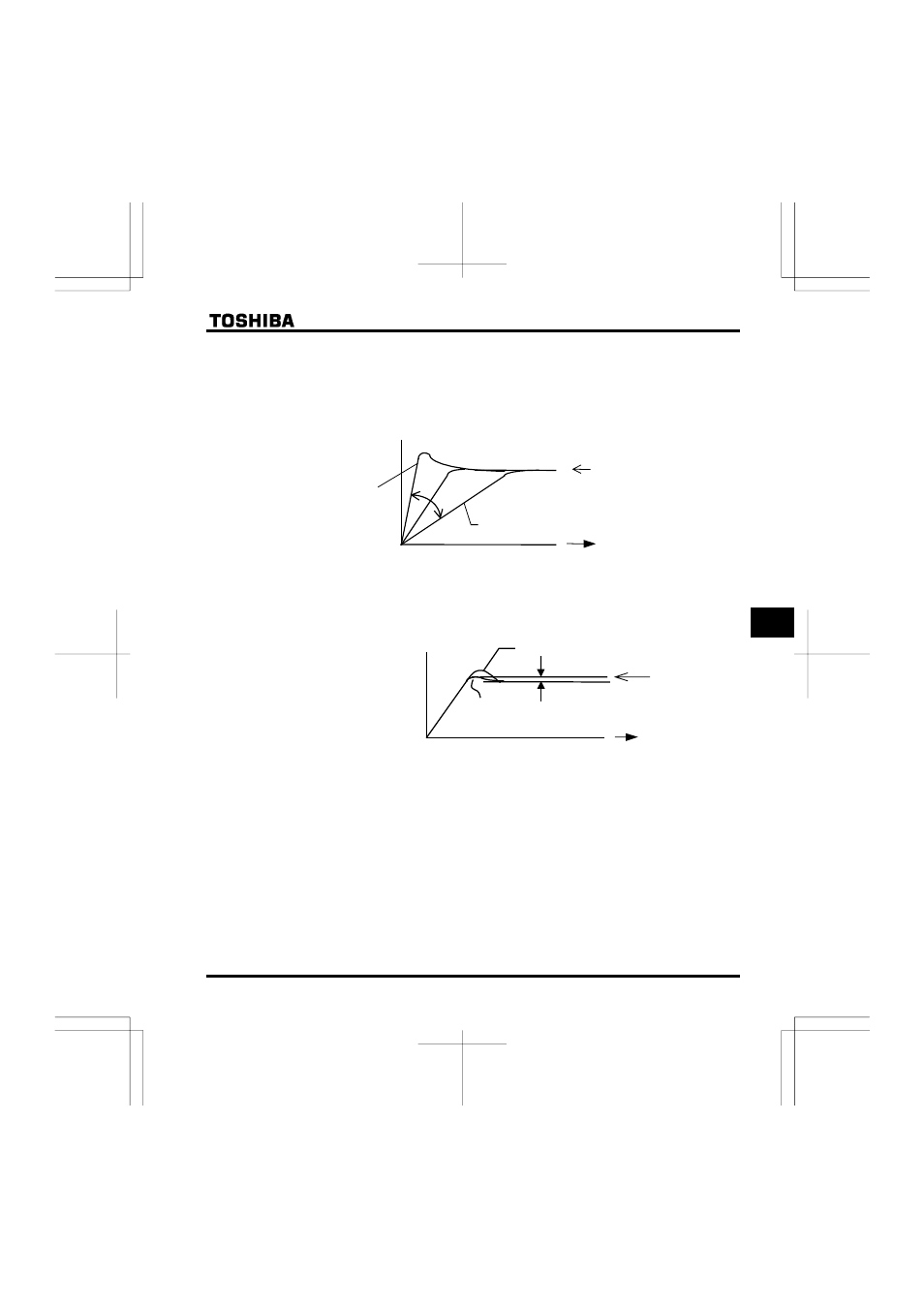
This parameter adjusts the proportional gain level during PID control. A correction value proportional to
the particular deviation (the difference between the set frequency and the feedback value) is obtained
by multiplying this deviation by the parameter setting.
A larger P-gain adjustment value gives faster response. Too large an adjustment value, however,
results in an unstable event such as hunting.
Slow response (H = Small gain)
Process quantity setting value
Time
Feedback amount
Fast response
(H = Large gain)
H
(I-gain adjustment parameter)
This parameter adjusts the integral gain level during PID control. Any deviations remaining unremoved
during proportional action are cleared to zero (residual deviation offset function).
A larger I-gain adjustment value reduces residual deviations. Too large an adjustment value, however,
results in an unstable event such as hunting.
Residual deviation
Process quantity
setting value
Time
Feedback amount
(H = Large gain)
(H = Small gain)
+
If one of input terminals is assigned input terminal function 65 (PID control integral value clear), integral
value is always 0 (zero) during the input terminal on.