Rockwell Automation 1756-DMF30 ControlLogix Drive Module User Manual
Page 287
Publication 1756-UM522B-EN-P - February 2003
1756-DMF30 Specific Information C-35
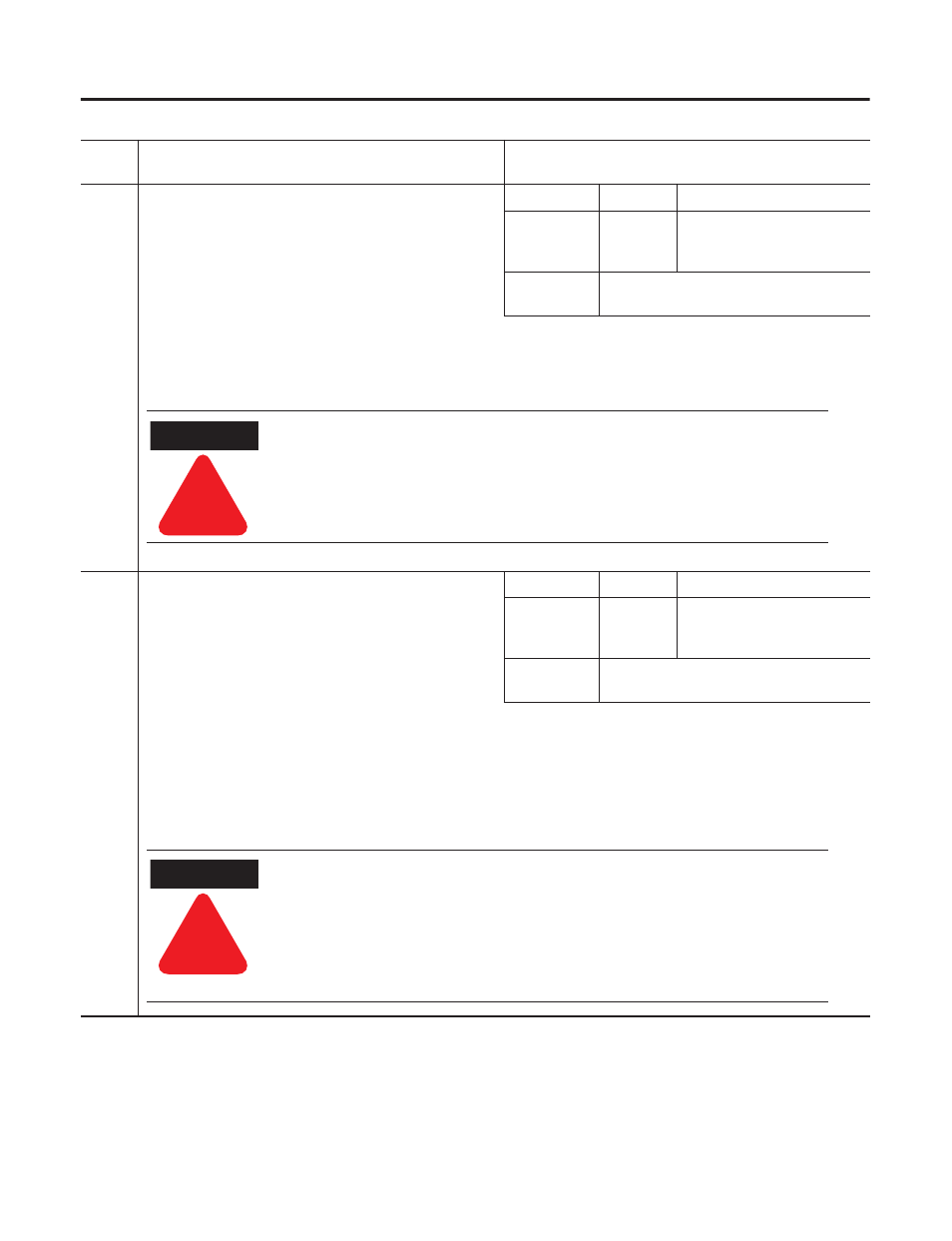
384
Lgx Closed Cnfg
Enter a value to configure the Drive Module's response to the
controller closing the Controller to Drive Module connection.
• Value 0 - Ignore configures the drive to continue
running, as normal, when this event occurs
• Value 1 - Alarm configures the drive to continue
running and set the appropriate alarm bit when this
event occurs
• Value 2 - FltCoastStop configures the drive to perform a
coast stop and set the appropriate fault bit, in response
this event.
Default:
Val 2
FltCoastStop
Options:
Val 0
Val 1
Val 2
Ignore
Alarm
FltCoastStop
File:
Group:
Utility
Fault/Alm Config
385
Lgx LinkChngCnfg
Enter a value to configure the Drive Module's response to
Controller to Drive Module default links being removed. A
default link is a link automatically set up when a
communication format is selected for the Controller to Drive
Module connection.
• Value 0 - Ignore configures the drive to continue
running, as normal, when this event occurs
• Value 1 - Alarm configures the drive to continue
running and set the appropriate alarm bit when this
event occurs
• Value 2 - FltCoastStop configures the drive to perform a
coast stop and set the appropriate fault bit, in response
this event.
Default:
Val 2
FltCoastStop
Options:
Val 0
Val 1
Val 2
Ignore
Alarm
FltCoastStop
File:
Group:
Utility
Fault/Alm Config
No.
Name
Description
Values
ATTENTION
!
Risk of injury or equipment damage exists. Parameter 384 [Lgx Closed
Cnfg] lets you determine the action of the drive if communications are
disrupted. By default this parameter causes the drive to fault and coast
to a stop. You can set this parameter so that the drive continues to run.
Precautions should be taken to ensure that the setting of this parameter
does not create a hazard of injury or equipment damage.
ATTENTION
!
Risk of injury or equipment damage exists. Parameter 385 [Lgx
LinkChngCnfg] lets you determine the action of the drive if
communications are disrupted. By default this parameter causes the
drive to fault and coast to a stop. You can set this parameter so that the
drive continues to run. Precautions should be taken to ensure that the
setting of this parameter does not create a hazard of injury or equipment
damage.