Rockwell Automation 1756-DMF30 ControlLogix Drive Module User Manual
Page 182
Publication 1756-UM522B-EN-P - February 2003
B-102 1756-DMD30 Specific Information
1010
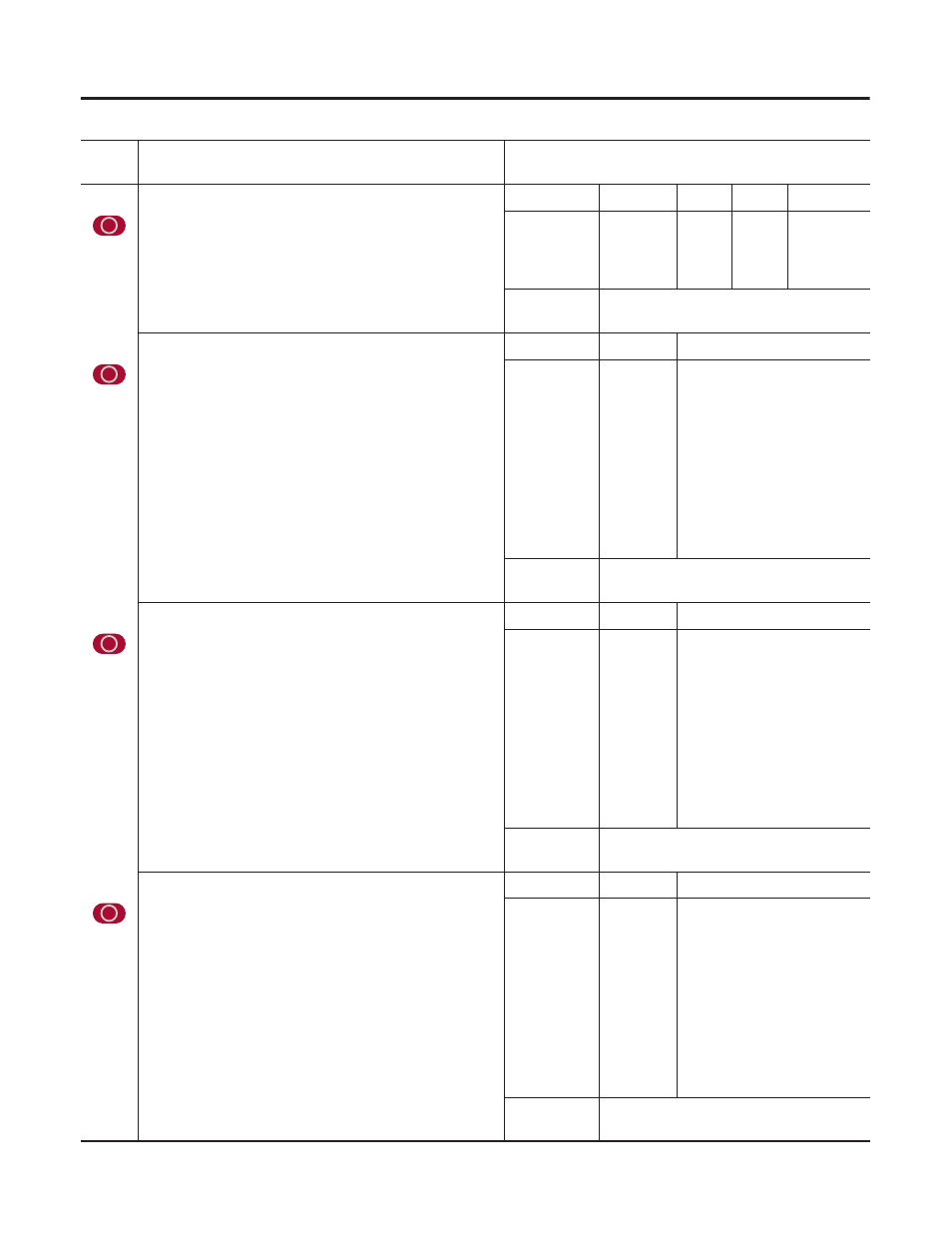
SL Rx Comm Frmt
Defines the node's communication format for receiving
SynchLink data. This determines the number of axis data,
direct data and buffered data words received. Configure the
format by using the Peer Communication window in
DriveExecutive programming software.
Value
Axis
Direct
Buffered
Options:
Val 0
Val 7
Val 9
Val 17
0
0
0
0
0
2
4
4
0
18
8
18
File:
Group:
SynchLink
SynchLink Config
1011
SL Rx DirectSel0
Determines the destination for the data received at word 0 of
direct received data. Configure the selection by using the Peer
Communication window.
Default:
Val 0
No Data
Options:
Val 0
Val 1
Val 2
Val 3
Val 4
Val 5
Val 6
Val 7
Val 8
Val 9
Val 10
No Data
SL Multiply
Event P0
Event P1
Event D0
Event D1
Event D2
Event D3
Event Opt0
Event Opt1
Event Status
File:
Group:
SynchLink
SynchLink Config
1012
SL Rx DirectSel1
Determines the destination for the data received at word 1 of
direct received data. Configure the selection by using the Peer
Communication window.
Default:
Val 0
No Data
Options:
Val 0
Val 1
Val 2
Val 3
Val 4
Val 5
Val 6
Val 7
Val 8
Val 9
Val 10
No Data
SL Multiply
Event P0
Event P1
Event D0
Event D1
Event D2
Event D3
Event Opt0
Event Opt1
Event Status
File:
Group:
SynchLink
SynchLink Config
1013
SL Rx DirectSel2
Determines the destination forved data. Configure the
selection by using the Peer Communication window.
Default:
Val 0
No Data
Options:
Val 0
Val 1
Val 2
Val 3
Val 4
Val 5
Val 6
Val 7
Val 8
Val 9
Val 10
No Data
SL Multiply
Event P0
Event P1
Event D0
Event D1
Event D2
Event D3
Event Opt0
Event Opt1
Event Status
File:
Group:
SynchLink
SynchLink Config
No.
Name
Description
Values