Logic status word, Position bit definitions, Velocity bit definitions – Rockwell Automation 25-COMM-D PowerFlex 525 DeviceNet Adapter User Manual
Page 128
128
Rockwell Automation Publication 520COM-UM002A-EN-E - April 2013
Appendix D
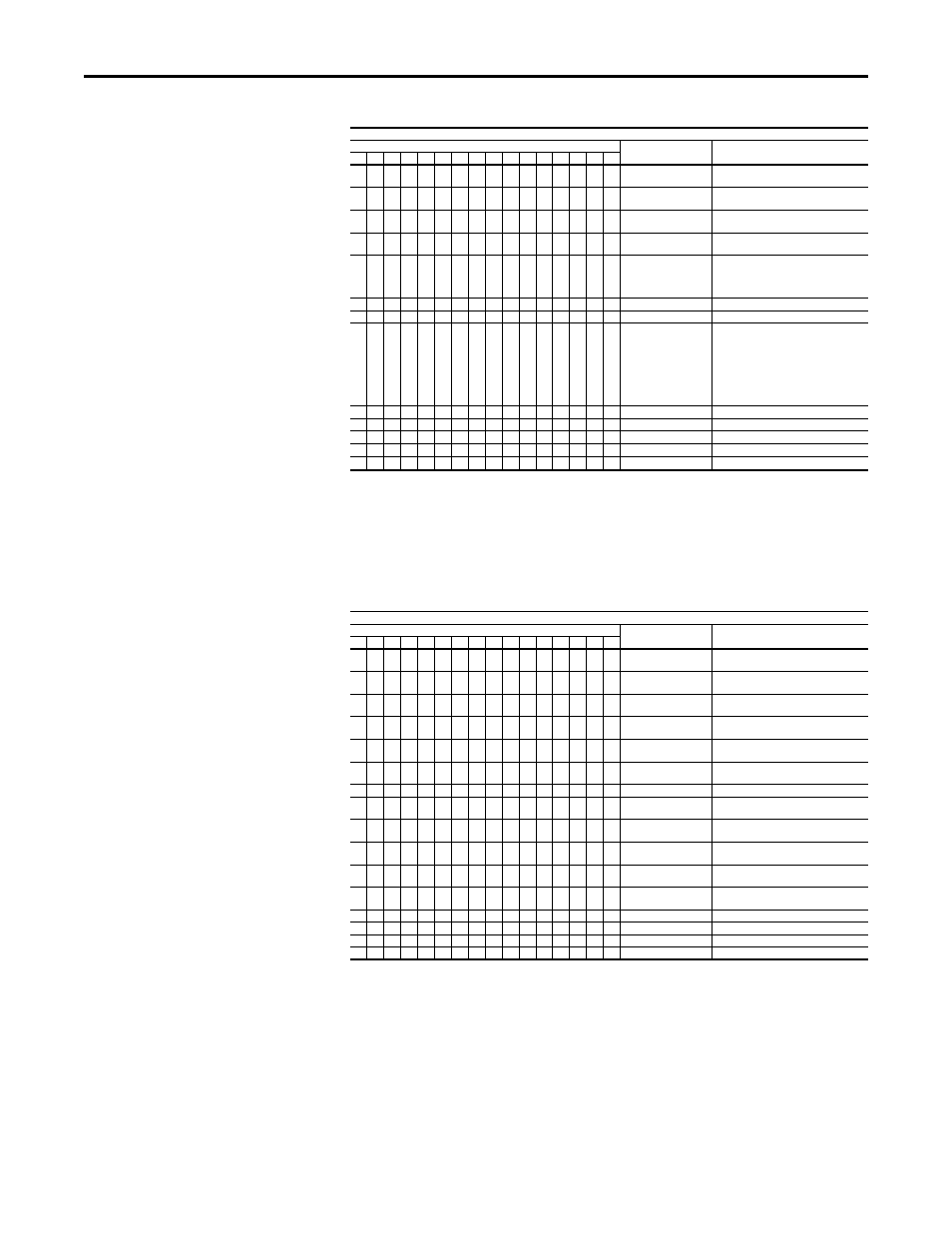
Logic Command/Status Words: PowerFlex 525 Drives
Position Bit Definitions
Logic Status Word
Velocity Bit Definitions
Comm Logic Command – C122 = 1 “Position”
Logic Bits
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
Command
Description
x
Normal Stop
0 = Not Normal Stop
1 = Normal Stop
x
Start
(1)
(1) A Not Stop condition (logic bit 0 = 0) must first be present before a 1 = Start condition will start the drive.
0 = Not Start
1 = Start
x
Jog 1
(2)
(2) A Not Stop condition (logic bit 0 = 0) must first be present before a 1 = Jog condition will jog the drive. A transition to a “0” will stop
the drive.
0 = Not Jog
1 = Jog
x
Clear Fault
(3)
(3) To perform this command, the value must switch from “0” to “1.”
0 = Not Clear Fault
1 = Clear Fault
x
x
Unipolar Direction
00 = No Command
01 = Forward Command
10 = Reverse Command
11 = No Command
x
Logic Input 1
1 = Logic In 1
x
Logic Input 2
1 = Logic In 2
x
x
x
Frequency and Position
Steps
000 = Frequency and Position Step 0
001 = Frequency and Position Step 1
010 = Frequency and Position Step 2
011 = Frequency and Position Step 3
100 = Frequency and Position Step 4
101 = Frequency and Position Step 5
110 = Frequency and Position Step 6
111 = Frequency and Position Step 7
x
Find Home
1 = Find Home
x
Hold Step
1 = Hold Step
x
Redefine Position
1 = Pos Redefine
x
Enable Sync
1 = Sync Enable
x
Disable Travel
1 = Travel Disable
Comm Logic Status – C122 = 0 “Velocity”
Logic Bits
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
Command
Description
x
Run Ready
0 = Not Ready to Run
1 = Ready to Run
x
Active
0 = Not Active
1 = Active (Running)
x
Command Direction
0 = Reverse
1 = Forward
x
Actual Direction
0 = Rotating Reverse
1 = Rotating Forward
x
Accel
0 = Not Accelerating
1 = Accelerating
x
Decel
0 = Not Decelerating
1 = Decelerating
x
Reserved
–
x
Fault
0 = Not Faulted
1 = Faulted
x
At Speed
0 = Not at Reference
1 = At Reference
x
Main Frequency
0 = Not Controlled by Active Com
1 = Controlled by Active Com
x
Operation Command
0 = Not Controlled by Active Com
1 = Controlled by Active Com
x
Parameters
0 = Not Locked
1 = Locked
x
Digital Input 1 Status
–
x
Digital Input 2 Status
–
x
Digital Input 3 Status
–
x
Digital Input 4 Status
–