Commissioning – Lenze ECSCMxxx User Manual
Page 155
Commissioning
Setting of homing parameters
Shifting the zero position with regard to the home position (offsets C3011, C3012)
l
155
EDBCSXM064 EN 11.0
6.13.3
Shifting the zero position with regard to the home position (offsets C3011, C3012)
0
C3011
Ref
1
2
3
C3012
4
0
v [m/s]
t [s]
ECSXA526
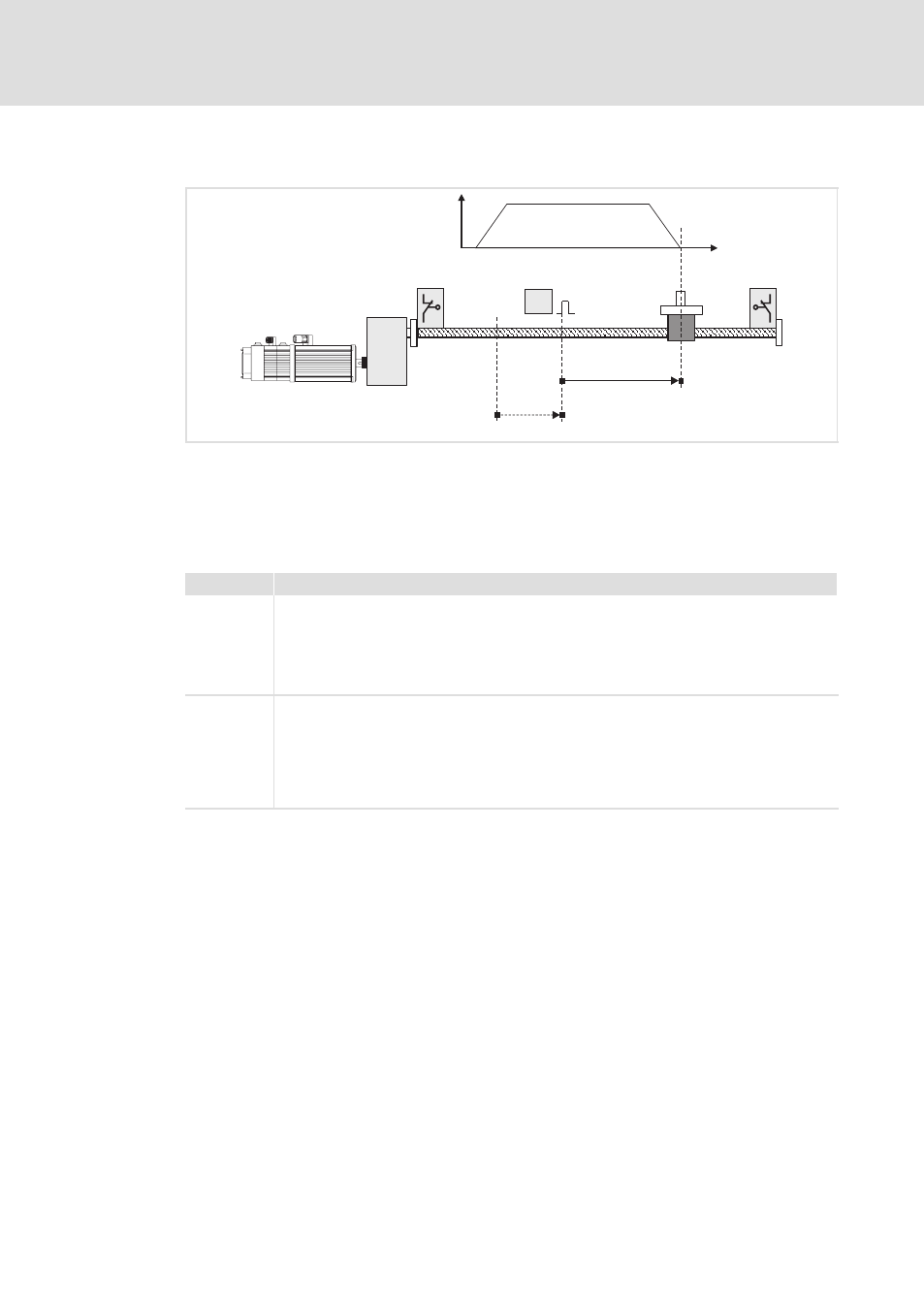
Fig. 6−27
Offset of the zero position (note: Different behaviour of ECS Motion and ECS Posi&Shaft)
0, 1 Negative and positive hardware limit switch
2
Home position (zero pulse/zero position of the position encoder)
3
Standstill position after completion of homing
4
Zero position of the measuring system after offset by C3011 and C3012
REF Reference switch
Code
Description
C3011
Offset between home position and standstill position
l
Distance still to be traversed [inc] after reaching the home position (e.g. zero pulse (zero
position of the position encoder)).
l
Positive values: Drive motion towards the positive hardware limit switch.
l
Negative values: Drive motion towards the negative hardware limit switch.
l
Value range: −2140000000 ... 2140000000 [inc]
C3012
Offset for shifting the zero position:
l
Positive values: Offset of the zero position towards the negative hardware limit switch.
l
Negative values: Offset of the zero position towards the positive hardware limit switch.
l
The zero position is offset without any further drive motion.
l
Actual position via MotionBus = C3011 + C3012 (The outcome of this is the offset of the zero
position.)
l
Value range: −2147483647... 2147483647 [inc]
Example
1. C3011 = 100000 [inc]:
After reaching the home position (e.g. zero pulse (zero position of the position
encoder)) the drive travels in positive direction by 100000 [inc].
The zero position is situated at the home position.
2. a) C3012 = 50000 [inc] (compare Fig. 6−27):
The zero position is offset by 50000 [inc] in negative direction.
Actual position = 100000 [inc] + 50000 [inc] = 150000 [inc]
b) C3012 = −50000 [inc]:
The zero position is offset by 50000 [inc] in positive direction.
Actual position = 100000 [inc] + (−50000 [inc]) = 50000 [inc]