Diagnostics – Lenze ECSCMxxx User Manual
Page 257
Diagnostics
Diagnostics with Global Drive Oscilloscope (GDO)
Diagnostics with GDO
l
257
EDBCSXM064 EN 11.0
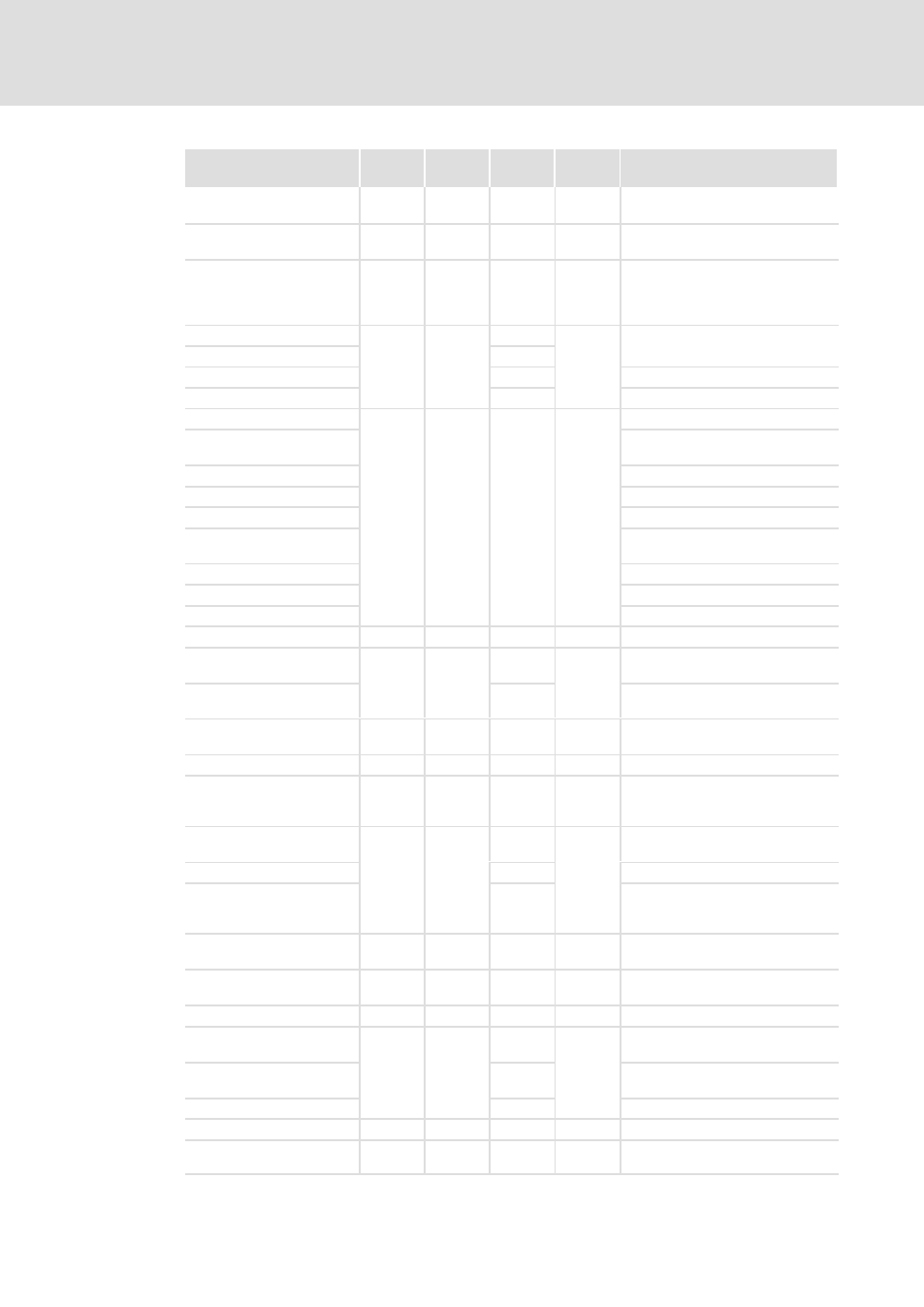
Description
Display
format
Code
Signal
type
Data type
Variable
CAN1_dnOutD1_p
double
Integer
Position
˘
˘
Actual position [inc]
65536 inc = 1 revolution
CAN1_bSyncInsideWindow_
b
BOOL
binary
C3165
bin
Synchronisation telegram within
the set window (
^ 209)
CAN1_nSyncDeviation
Integer
analog
C4264
˘
Deviation of the control program
synchronisation
This also applies to synchronisation
via the digital input X6/DI1.
DCTRL_bCInh1_b
BOOL
binary
C0878/1
bin
Controller inhibit
DCTRL_bCInh2_b
C0878/2
DCTRL_bTripSet_b
C0878/3
TRIP−SET
DCTRL_bTripReset_b
C0878/4
TRIP−RESET
DCTRL_bFail_b
BOOL
binary
˘
˘
TRUE = active error
DCTRL_bImp_b
TRUE = high−resistance power
output stages
DCTRL_bTrip_b
TRUE = active fault
DCTRL_bQspIn_b
TRUE = QSP
DCTRL_bRdy_b
TRUE = ready for operation
DCTRL_bCwCcw_b
TRUE = CCW rotation
FALSE = CW rotation
DCTRL_bNActEq0_b
TRUE = motor speed < C0019
DCTRL_bCInh_b
TRUE = controller inhibit
DCTRL_bExternalFault_b
TRUE = external error
MCTRL_bQspOut_b
BOOL
binary
C0907/3
bin
TRUE = drive executes QSP
MCTRL_nHiMLim_a
Integer
analog
C0906/4
dec [%]
Upper torque limitation (in % of
C0057)
MCTRL_nLoMLim_a
C0906/3
Lower torque limitation (in % of
C0057)
MCTRL_bNMSwt_b
BOOL
binary
C0907/2
bin
TRUE = torque control
FALSE = speed control
MCTRL_bnNAdapt_a
Integer
analog
˘
˘
Adaptive Vp of the speed controller
MCTRL_bILoad_b
BOOL
binary
C0907/4
bin
TRUE = integral action component
of the speed controller is accepted
by MCTRL_nISet_a.
MCTRL_nISet_a
Integer
analog
C0906/8
dec [%]
Integral action component of the
speed controller
MCTRL_nNSet_a
C0906/1
Speed setpoint
MCTRL_nPAdapt_a
C0906/9
Influence of C0254 on Vp (in %)
l
The amount is processed
(without sign).
MCTRL_dnPosSet_p
double
Integer
Position
C0908
dec [inc]
Deviation between setpoint angle
and actual angle for angle controller
MCTRL_nPosLim_a
Integer
analog
C0906/5
dec [%]
Influence of angle controller
l
In % of n
max
(C0011)
MCTRL_bPosOn_b
BOOL
binary
C0907/1
˘
TRUE = activation of angle controller
MCTRL_nNStartMLim_a
Integer
analog
C0906/6
dec [%]
Lower speed limit for speed
limitation
MCTRL_nMAdd_a
C0906/2
Additional torque setpoint or torque
setpoint
MCTRL_nFldWeak_a
C0906/7
Motor control
MCTRL_bQspIn_b
BOOL
binary
C0042
bin
TRUE = drive executes QSP
MCTRL_nNSetIn_a
Integer
analog
C0050
dec [%]
Speed setpoint
l
In % of n
max
(C0011)