Configuration – Lenze ECSCMxxx User Manual
Page 208
Configuration
Configuring MotionBus/system bus (CAN)
Axis synchronisation (CAN synchronisation)
l
208
EDBCSXM064 EN 11.0
Start of axis synchronisation
After mains connection and the initialisation phase, the synchronisation is started. After
the first sync telegrams have been received, it takes a few seconds until the system is
compensated. The duration of this process is basically determined by the interval of the
sync signals and the sync correction increment.
The CAN sync correction increment (C0363) indicates the increment used to extend or
shorten the control cycle (e.g. to shift the start time).
The lowest value preset by default can be left as it is. Only in unfavourable conditions (e.g.
if the sync master does not exactly comply with its cycle time) it may be necessary to
prolong the CAN sync correction increment so that the value in C4264 is reduced to a
minimum. Apart from that, a prolongation has a more negative effect on the drive
characteristics.
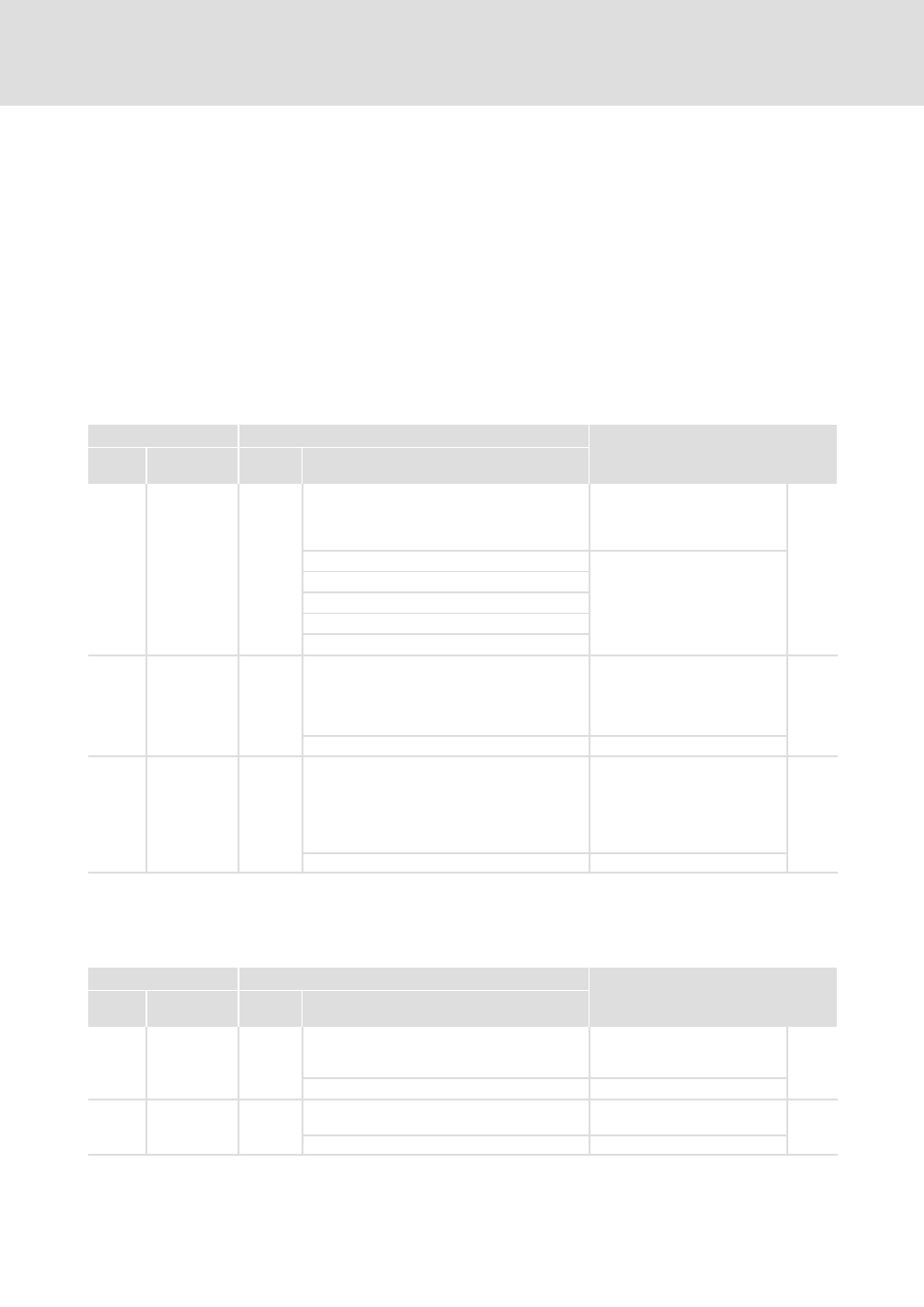
Code
Possible settings
IMPORTANT
No.
Designation
Lenze/
{Appl.}
Selection
C0363 Sync correct.
1
Sync correction increment (for
CAN and EtherCAT)
l
Change correction value until
C4264 reaches the minimum.
^ 208
1
0.2
ms/ms
2
0.4
ms/ms
3
0.6
ms/ms
4
0.8
ms/ms
5
1.0
ms/ms
C0369 SyNc Tx Time
0
{0}
CAN sync transmission cycle for
CAN bus interface X4
A sync telegram with the
identifier set in C0368 is sent
with the set cycle time.
^ 208
0
{1 ms}
65000 0 = switched off
C4264 CanSync_Dev
0
Deviation of the control program
synchronisation
This also applies to
synchronisation via the digital
input X6/DI1.
Read only
^ 208
−32767
{1}
32767
CAN sync identifiers
The transmit and receive identifiers of the sync telegram can be configured via the
following codes:
Code
Possible settings
IMPORTANT
No.
Designation
Lenze/
{Appl.}
Selection
C0367 Sync Rx ID
128
CAN sync receipt ID for CAN bus
interface X4
^ 208
1
{1}
256
C0368 Sync Tx Id
128
CAN Sync transmission ID for
CAN bus interface X4
^ 336
^ 207
1
{1}
256