16 following error monitoring (c3030, c3031), Commissioning – Lenze ECSCMxxx User Manual
Page 170
Commissioning
Following error monitoring (C3030, C3031)
l
170
EDBCSXM064 EN 11.0
6.16
Following error monitoring (C3030, C3031)
Following errors are monitored in all motion states of the drive.
To configure the monitoring of following errors use C3030/C3031 (following error limits)
and C3032/C3033 (reactions to following errors) in the GDC parameter menu under
Motion
W Machine parameter.
v [m/s]
t [s]
A
B
ECSXA416
Fig. 6−31
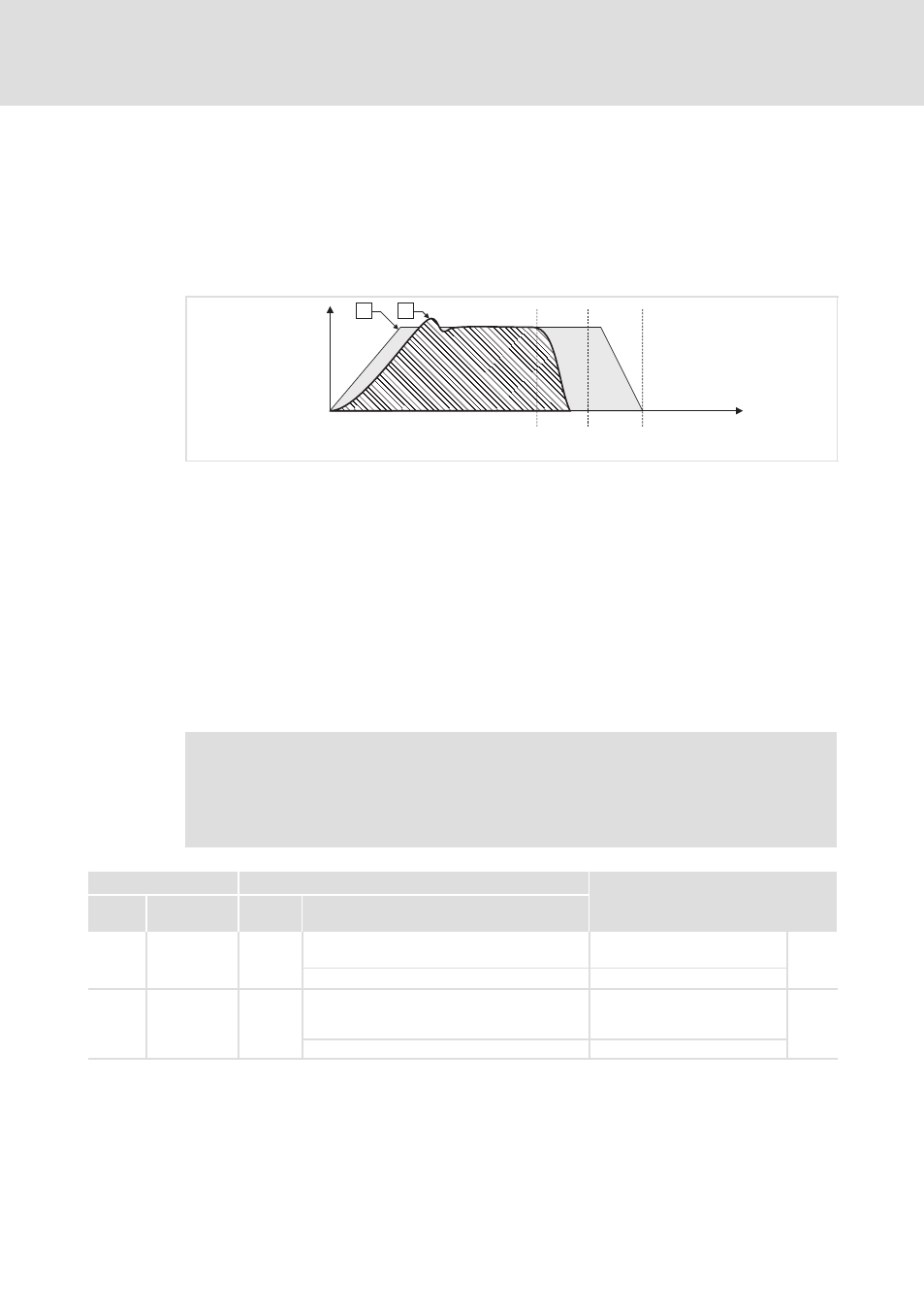
Following error
0
Setpoint speed profile (the area below the curve corresponds to the path)
1
Profile travelled
The drive decelerates, a difference between set position and actual position arises.
Following error tolerance is exceeded.
End of the set profile
If the difference between set position and actual position is higher than the following error
limit, the higher−level control must activate a reaction according to the set error class.
ƒ
When the first following error limit in C3030 is reached, the first error reaction set in
C3032 is activated.
ƒ
When the first following error limit in C3030 is reached, the second error reaction
set in C3033 is activated.
)
Note!
For correct monitoring of following errors set:
ƒ
Limit value in C3031 > limit value in C3030 and
ƒ
error reaction in C3033 stronger than error reaction in C3032
Code
Possible settings
IMPORTANT
No.
Designation
Lenze/
{Appl.}
Selection
C3030 FolloErrWarn
400000
Following error limit for enabling
a warning
^ 170
0
{1 inc}
2140000000
C3031 FolloErrFail
800000
Following error limit for enabling
a FAIL−QSP
(Quick stop (QSP) is executed.)
^ 170
0
{1 inc}
2140000000