Appendix – Lenze ECSCMxxx User Manual
Page 328
Appendix
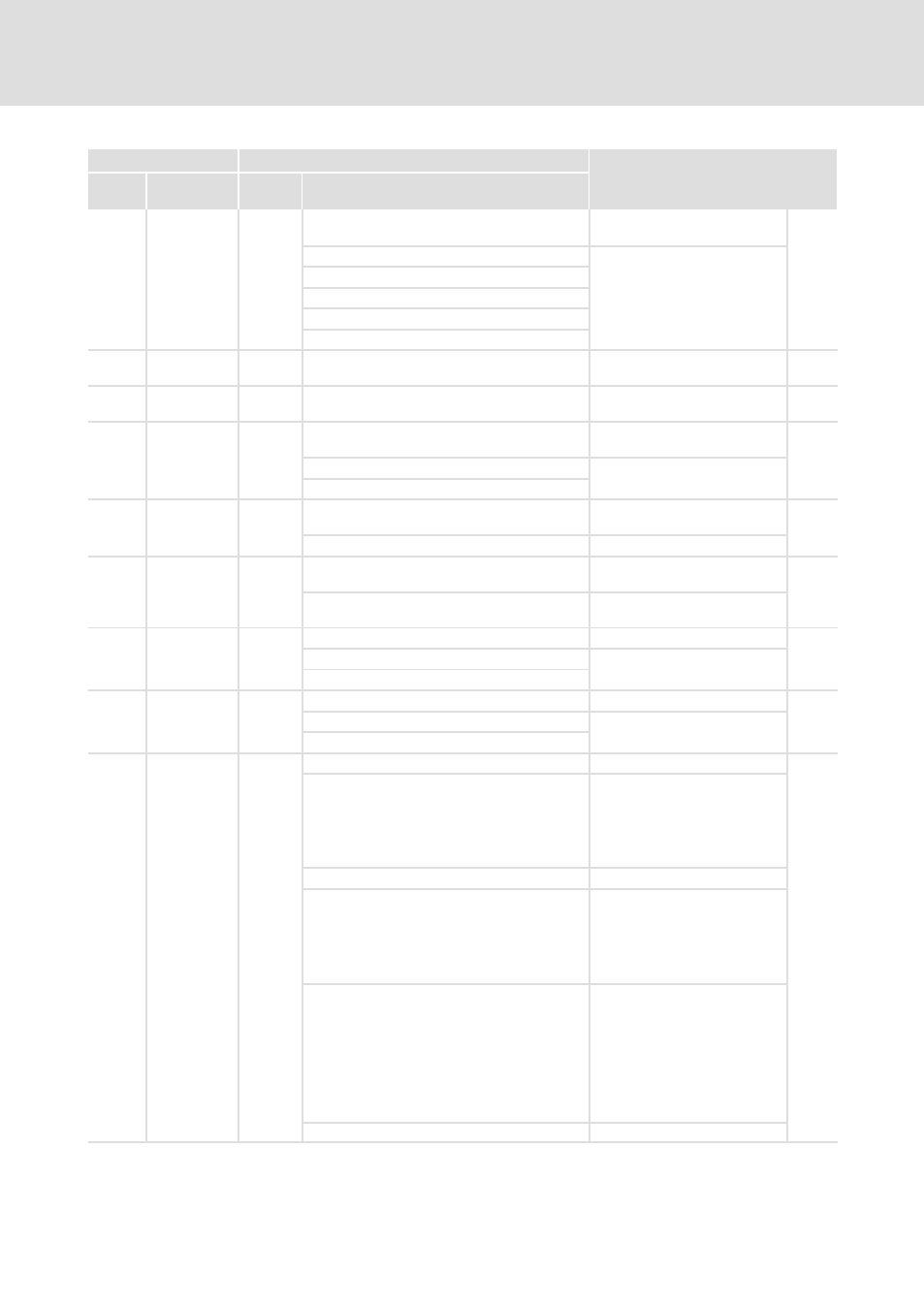
Code table
l
328
EDBCSXM064 EN 11.0
IMPORTANT
Possible settings
Code
Selection
Lenze/
{Appl.}
Designation
No.
C3201 FailReaction
0
Fault handling
Read only
0
TRIP
1
Message
2
Warning
3
FAIL−QSP
4
Not assigned
C3210 Failnumber
0
All fault indications
(TRIP, FAIL−QSP, warning, message)
Current fault number
Read only
^ 270
C3211 FailNumber
Old
0
All fault indications
(TRIP, FAIL−QSP, warning, message)
Previous fault number
Read only
^ 270
C3420 M_Pilot_
Contr
1
Torque feedforward control
0
Off
1
On
C3421 M_Operate_
TH
10
Torque operating threshold
0
{1 units}
16384
C3422 PilotCon
MGain
1.0
Gain of torque feedforward
control
1.00
{0.01
units}
100.00
C3430 NPilotControl
1
Speed feedforward control
0
Off
1
On
C4000 GlobalReset
0
Global reset of the PRG
0
Off
1
On
C4010 Ctrl_Interf
0
Control interface selection
^ 130
^ 167
^ 165
0
CAN1 (PDO1 with sync)
The control word is expected via
the PDO CAN1_IN. Control is
carried out via the CAN interface
X4 (MotionBus). Control and
status information is sent and
received via CAN1_IN (PDO1).
1
Without function
2
AIF X1 (PDO1 with sync)
Control via the automation
interface (AIF) X1 is only possible
in conjunction with the
EMF2192IB EtherCAT
communication module.
(From Motion V3.0)
3
C4040 (control via codes)
Control is carried out via codes.
The control word "Ctrl1" is set
via code C4040. The Global Drive
Control (GDC) diagnostics and
parameterisation software can
for instance be used to change
individual control bits in order to
simulate the higher−level control
for testing purposes.
4
Without function