Heat and cool outputs – Watlow CPC400 User Manual
Page 98
Chapter 4: Tuning and Control
CPC400 Series User’s Guide
84
Watlow Anafaze
Doc. 0600-2900-2000
Proportional, Integral and Derivative Control (PID)
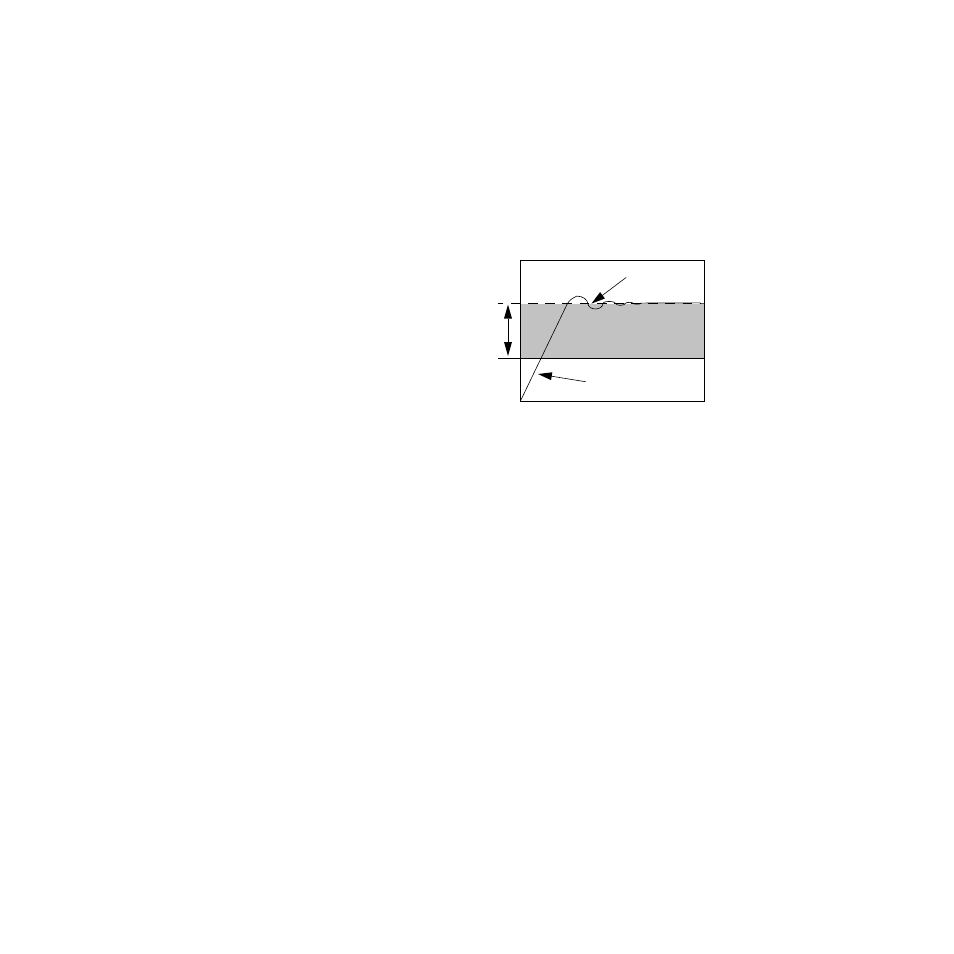
Derivative control corrects for overshoot by anticipating
the behavior of the process variable and adjusting the out-
put appropriately. For example, if the process variable is
rapidly approaching the set point from below, derivative
control reduces the output, anticipating that the process
variable will reach set point. Use derivative control to re-
duce the overshoot and oscillation of the process variable
that is common to PI control. Figure 4.4 shows a process
under full PID control.
Figure 4.4
Proportional, Integral and Deriva-
tive Control
Heat and Cool Outputs
Each loop may have one or two outputs. Often a heater is
controlled according to the feedback from a thermocouple,
in which case only one output is needed.
In other applications, two outputs may be used for control
according to one input. For example, a system with a heater
and a proportional valve that controls cooling water flow
can be controlled according to feedback from one thermo-
couple.
In such systems, the control algorithm avoids switching too
frequently between heat and cool outputs. The on/off algo-
rithm uses the control hysteresis parameter to prevent
such oscillations (see Hysteresis on page 113). When PID
control is used for one or both loop outputs, both the hyster-
esis parameter and PID parameters determine when con-
trol switches between heating and cooling.
Proportional
Set Point
Process Variable
Band