IAI America SCON-C User Manual
Page 97
79
(5) Push
Select either the positioning mode or push & hold mode.
The default setting is “0.”
0:
Positioning mode (= normal operation)
Other than 0: Push & hold mode [%]
If the push & hold mode is selected, enter the current-limiting value to be
applied to limit the AC servo motor current during push & hold operation.
Caution: Take note that if the push force is too small, a false detection may occur during push & hold operation
due to sliding resistance, etc.
(6) Threshold
This field is not used for this controller.
The factory setting is “0.”
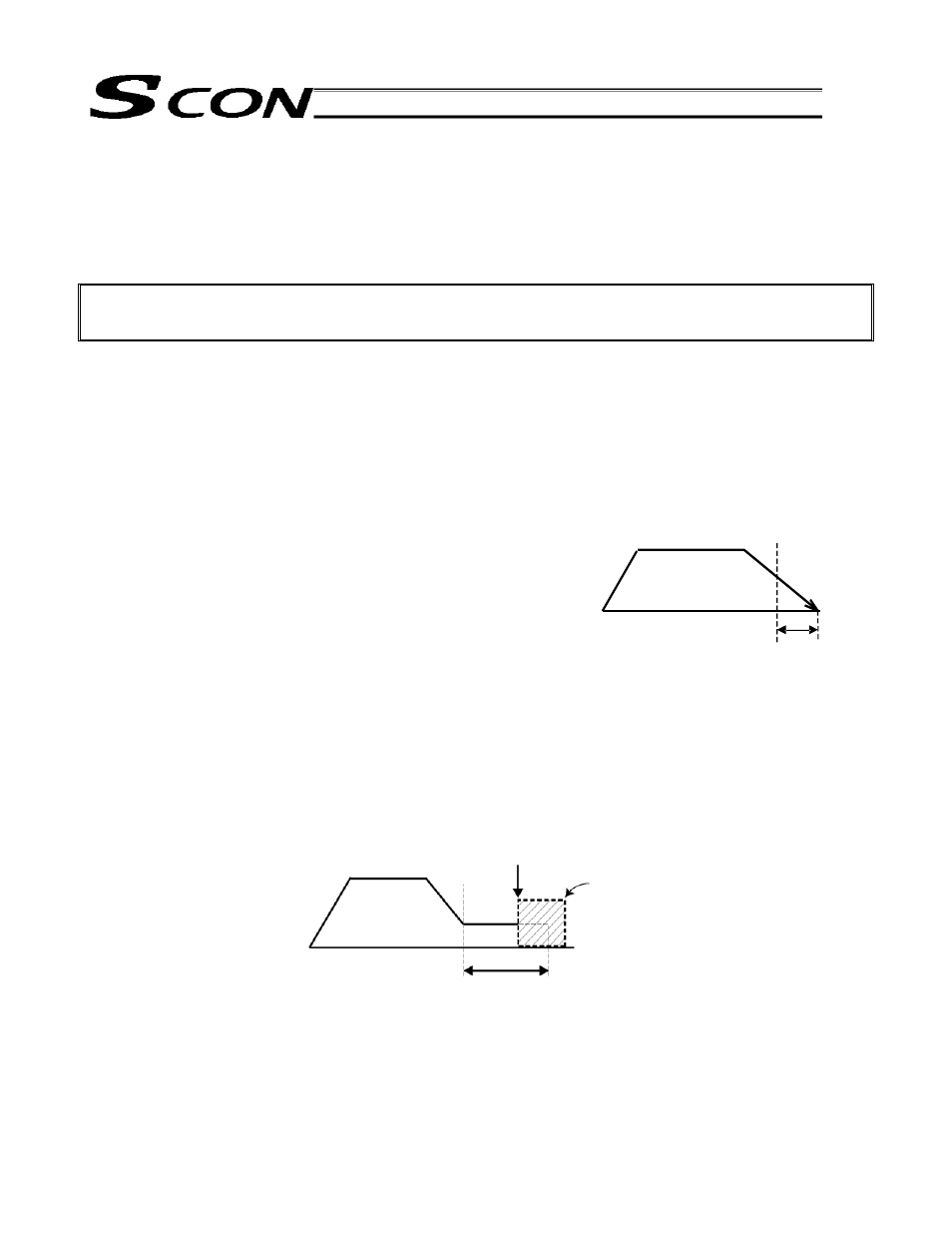
(7) Positioning
band
The meaning of this field varies
between “positioning operation” and
“push & hold operation.”
“Positioning operation”:
This field defines how much before
the target position the completion
signal will turn ON.
Increasing the positioning band
allows the next operation in the
sequence to be started early, and
consequently the tact time can be
reduced. Set an optimal value by
checking the overall balance of the
system.
“Push & hold operation”
This field defines the maximum push distance after reaching the target position
in push & hold operation.
Consider possible mechanical variation of the load and set an appropriate
positioning band that will prevent the positioning from completing before the
load is contacted.
The position complete signal turns ON here, as completion of
push action is recognized after the load has been contacted.
Load
Target position
Positioning band (maximum push distance)
The position
complete signal
turns ON here.
Positioning band
Target
position