IAI America SCON-C User Manual
Page 75
57
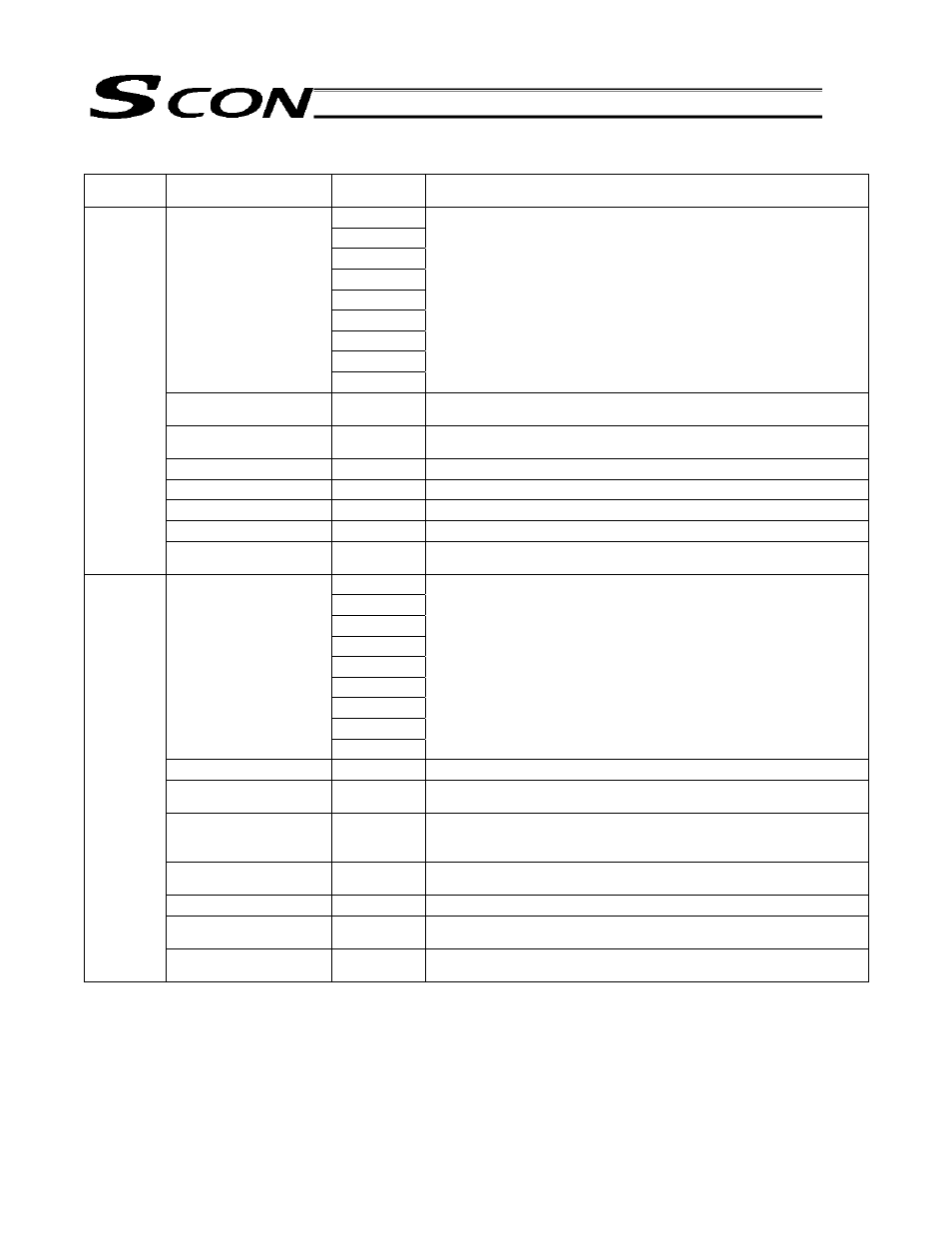
PIO pattern = 3 512-point mode [512-point type]
Category Signal
name
Signal
abbreviation
Function overview
PC1
PC2
PC4
PC8
PC16
PC32
PC64
PC128
Command position
number
PC256
The target position number is input.
A command position number must be specified by 6 ms before the
start signal (CSTR) turns ON.
Brake release
BKRL
This signal is used on an actuator equipped with a brake to forcibly
release the brake.
Operating mode
RMOD
This signal switches the operating mode between AUTO and MANU.
(ON: MANU, OFF: AUTO)
Home return
HOME
Home return operation is started at a rise edge of this signal.
Pause
*STP
ON: Actuator can be moved, OFF: Actuator decelerates to a stop
Start
CSTR
The actuator will start moving at a rise edge of this signal.
Alarm reset
RES
An alarm is reset at a rise edge of this signal.
Input
Servo ON
SON
The servo remains ON while this signal is ON.
The servo remains OFF while this signal is OFF.
PM1
PM2
PM4
PM8
PM16
PM32
PM64
PM128
Completed position
number
PC256
The relevant position number is output when positioning has
completed.
The signal will turn OFF when the next start signal is received.
It is used by the PLC to check if the commanded position has
definitively been reached, and also to provide a position interlock, etc.
Operating mode status
RMDS
A signal indicating the operating mode of AUTO or MANU is output.
Home return completion HEND
This signal is OFF immediately after the power is input, and turns ON
when home return has completed.
Position complete
PEND
This signal turns ON when the actuator has moved to the target
position and entered the positioning band. It is used to determine if
the positioning has completed.
Servo-on status
SV
This signal is always output once the servo is turned ON and the
controller is ready to operate.
Emergency stop status
*EMGS
OFF: Emergency stop has been actuated
Alarm *ALM
This signal remains ON in normal conditions of use and turns OFF
when an alarm generates.
Output
Battery alarm
*BALM
This signal is ON when the absolute battery voltage is normal or an
incremental encoder is used.