IAI America SCON-C User Manual
Page 131
113
Speed
Return action
Returned position
250.34 mm
Target position
280 mm
Position where the push &
hold operation completed
290.34 mm
3.4.1
Return Action after Push & Hold by Relative Coordinate Specification
Positioning mode
The reference position is the target position for the position number used in the applicable push & hold operation.
In the aforementioned example, the actuator moves to the 240-mm position if position No. 2 is set to -40 mm in
the incremental mode (280 – 40 = 240 mm).
Push & hold mode
The reference position is the position where the push & hold operation completed.
In the aforementioned example, the actuator moves to the 250.34-mm position if position No. 2 is set to -40 mm
in the incremental mode and the push & hold operation completed at 290. 34 mm (290.34 – 40 = 250.34 mm).
(Note) In this case, the controller determines that the actuator has missed the load and thus does not turn ON
the position complete signal.
It is therefore recommended that the zone output signal be used to determine completion of push & hold
operation on the PLC side.
Caution: When the start signal turns ON, the position complete output will turn OFF and the moving output will
turn ON.
Always turn OFF the start signal after confirming that the start signal is currently ON and the position
complete output has turned OFF.
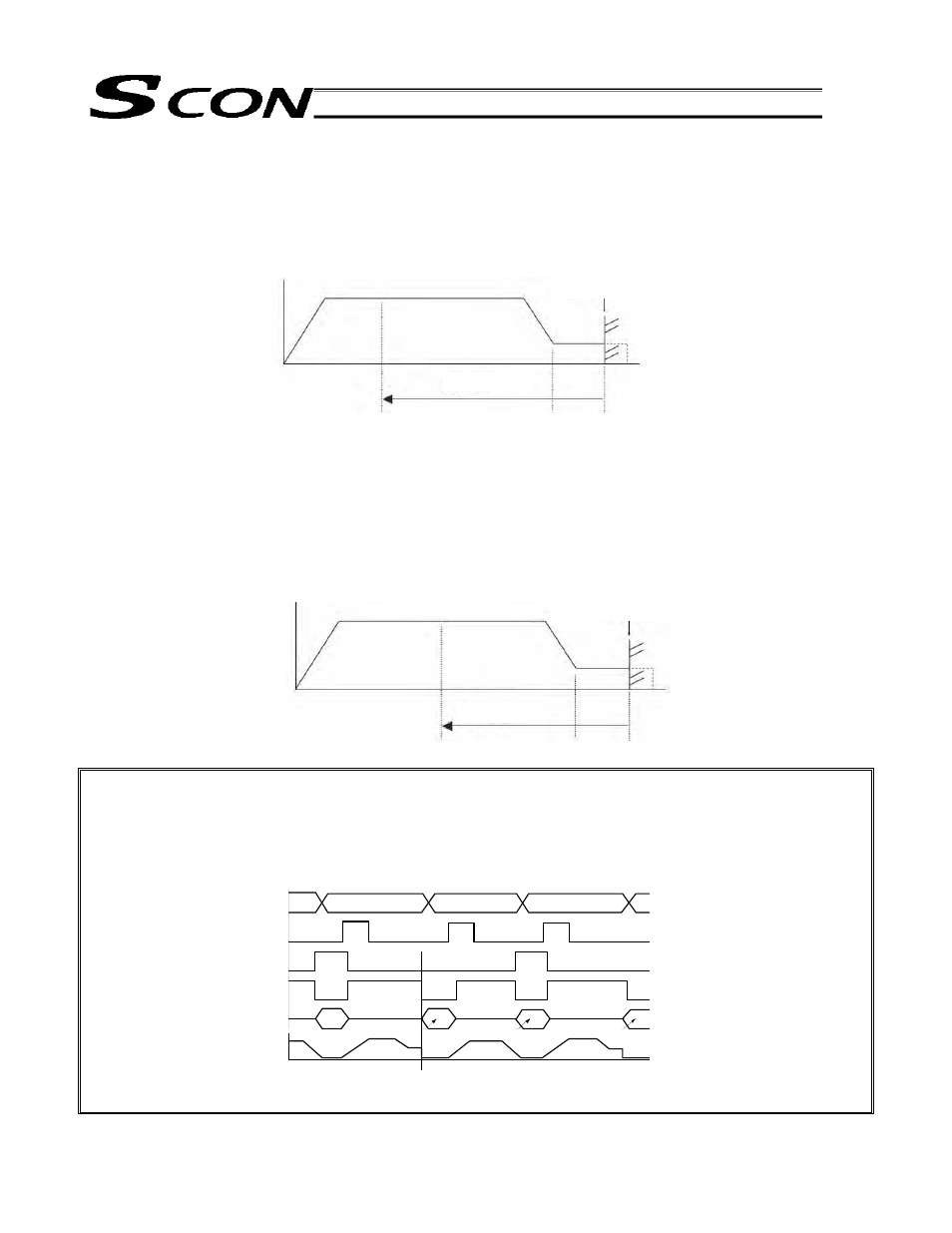
If the actuator has missed the load, the position complete output will not turn ON as shown below. The
completed position will be output and the moving output will turn OFF.
Speed
Return action
Returned position
240 mm
Position where the push &
hold operation completed
Target position
280 mm
Command position
Start
Position complete
Moving
Completed position
Actuator movement
Speed
Position 1
Position 2
Position 1
Position 1
Position 2
Position 1
If the actuator has missed the load, the
position complete output will not turn ON.