IAI America SCON-C User Manual
Page 181
163
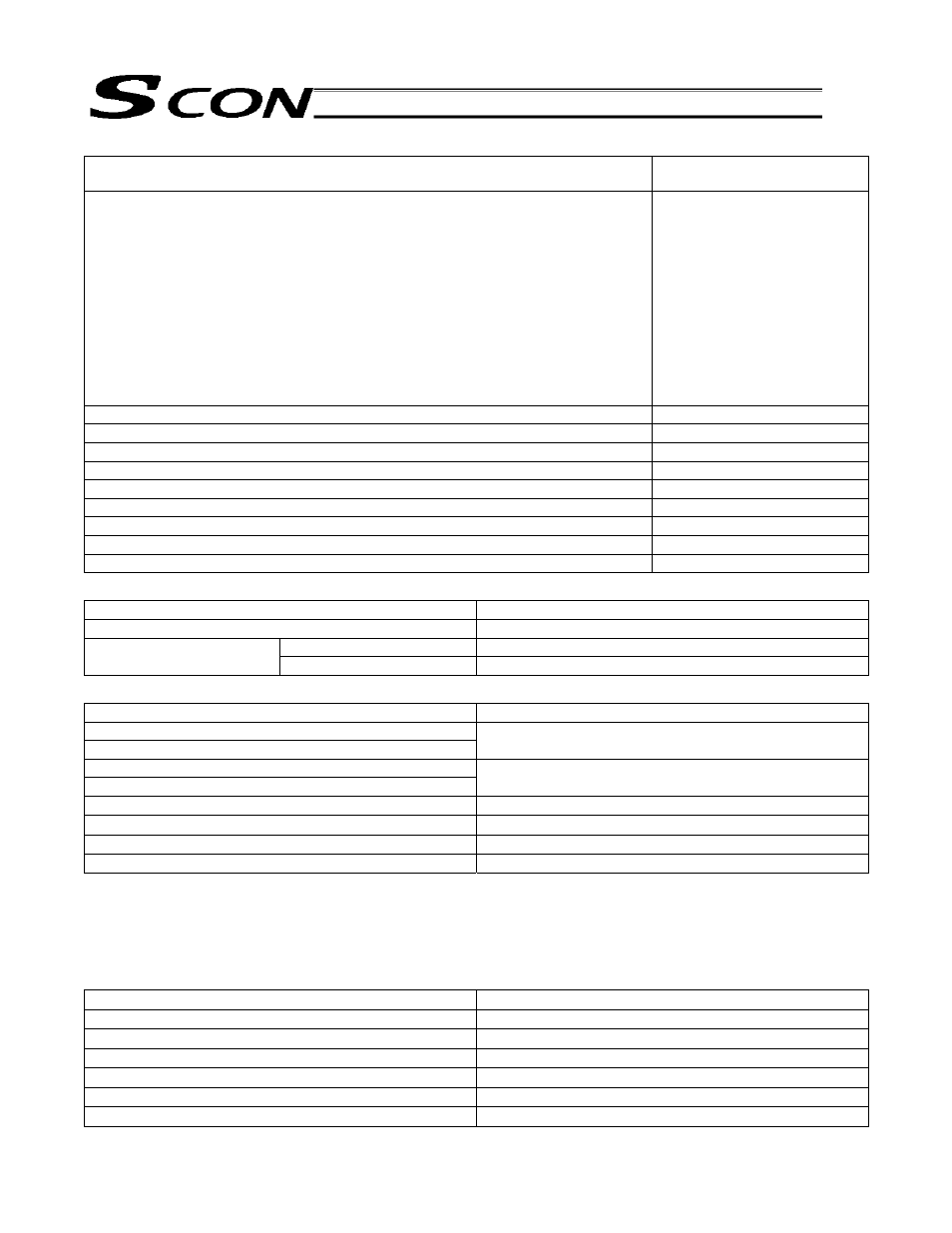
The number of encoder pulses varies depending on the actuator type.
Actuator type
Number of encoder pulses
(pulses/rev)
RCS-SS (R)/RCS-SM (R)/RCS-RA55/RCS-F55
ISP (D) (A)/IS (D) (A)/IS (P) A/IF/FS/SS/NS (excluding NS-S***-I)
RS-60/RS-30
DS-SA4/5/6 [T1]
RCS2-SA4 (C) (D) (R) RCS2-SA5 (C) (D) (R) /RCS2-SA6 (C) (D) (R)
RCS2-A4R/RCS2-A5R/RCS2-A6R/RCS2-SA7 (C)
RCS2-SS7C/RCS2-SS7R/RCS2-SS8C/RCS2-SS8R
RCS2-RA5C/RCS2-RA5R/RCS2-F5D
RCS2-RA4C (D) (R) /RCS2-RA13R
RCS2-G20/RCS2-RT6/RCS2-RT6R/RCS2-RT7R
RCS-G20/RCS2-GR8/RCS3
RCS2-RTC8L/RCS2-RTC8HL/RCS2-RTC10L/RCS2-RTC12L
16384
RCS-RB7530/RCS-RB7535/RCS2-RA7AD/RCS-RA7BD 3072
RCS-G20/RCS-R10/RCS-R20/RCS-R30 4096
S6S (linear)
48000
S8S/S8H (linear)
60000
S10S/S10H (linear)
90000
H8S/H8H/L15S/N10S/N15S/N15H (linear)
50000
M19S/N19S (linear)
72000
W21S (linear)
45000
NS-S***-I
2400
With actuators of belt-drive type, the ball screw lead is assumed as follows in the calculation.
Actuator type
Lead (mm)
IF
35
HM 40
FS
Other than HM
25
The gear ratios of rotational axes and ROBO Rotaries are as follows.
Actuator type
Gear ratio
RS-60 1/50
or
RS-30 1/100
RCS-R10/ RCS2-RT6
RCS-R20/ RCS2-RT6R
1/18
RCS-R30/RCS2-RT7R 1/4
RCS-G20/RCS2-GR8 1/5
RCS2-RTC8L/RCS2-RTC8HL/RCS2-RTC10L
1/15 or 1/24
RCS2-RTC12L
1/18 or 1/30
In calculating the electronic gear ratio, the ROBO Gripper RCS-G20 is assumed as a “linear axis.”
Follow the rules below to use an appropriate ball screw lead for the RCS-G20:
When commands from the host controller specify values for one finger: 12.5 mm
When commands from the host controller specify total values of both fingers: 25 mm
With linear actuators, calculations are performed by assuming the lead as one of the following lengths as
applicable.
Actuator type
Gear ratio
S6S
48
S8S/S8H
60
S10S/S10H
90
H8S/H8H/L15S/N10S/N15S/N15H 50
M19S/N19S 72
W21S
45