IAI America SCON-C User Manual
Page 93
75
Current position number signal (PE0 to PE6) Solenoid valve mode 1 [7-point type]
When the PIO pattern is “4” (air-cylinder type), upon completion of positioning the position number (0 to 6)
specified in the applicable move command will be output separately. If push & hold operation is specified, the
corresponding PE signal will turn ON upon detection of successful push & hold operation. However, the
corresponding PE signal will also turn ON even after the load has been missed, so it is not recommended to
specify push & hold operation when missing of the load must be detected.
Simple alarm-code output function is not provided for these signals. If an alarm generates, only the *ALM signal
will turn OFF. Check the details of the alarm code by connecting the PC software or teaching pendant.
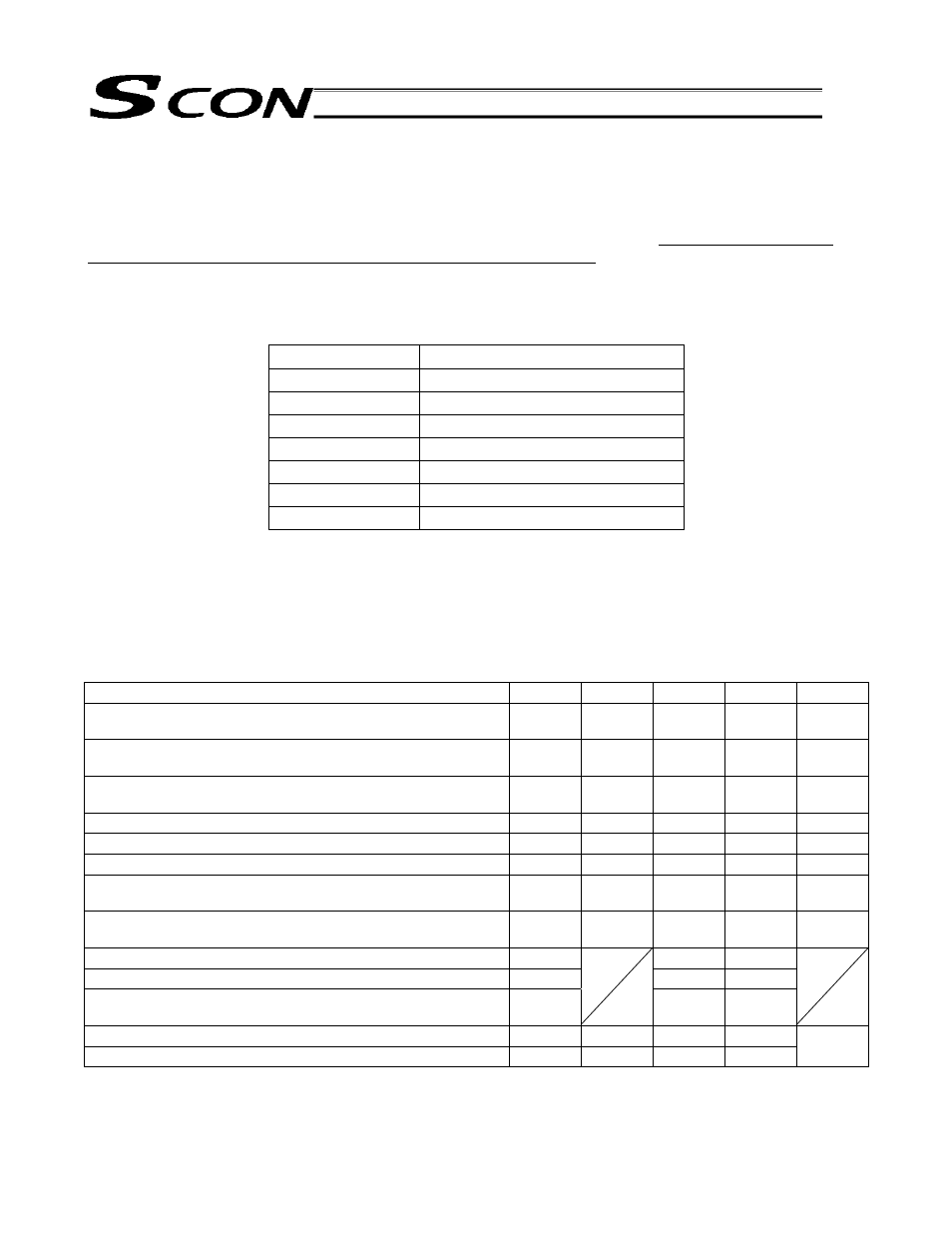
Correspondence table of output signals and positions completed
Output signal
Position completed
PE0
Position No. 0
PE1
Position No. 1
PE2
Position No. 2
PE3
Position No. 3
PE4
Position No. 4
PE5
Position No. 5
PE6
Position No. 6
Note) These signals turn OFF when the servo is turned OFF or an emergency stop is actuated. They will return
to the ON status when the servo is turned ON again, provided that the current position is inside the
positioning band with respect to the target position. If the current position is outside the band, the signals
will remain OFF.
(Reference) Output Signal Changes in Each Mode
Mode classification
MOVE
PEND
SV
HEND
PM1 ~
Actuator is stopped with the servo ON after the power was
input
OFF ON ON OFF OFF
Home return is in progress following an input of the home
return signal
ON OFF ON OFF OFF
Home return has completed following an input of the home
return signal
OFF ON ON ON OFF
Actuator is moving in the positioning/push & hold mode
ON
OFF
ON
ON
OFF
Actuator is paused in the positioning/push & hold mode
OFF
OFF
ON
ON
OFF
Positioning has completed in the positioning mode
OFF
ON
ON
ON
ON
Actuator has stopped after contacting the load in the push &
hold mode
OFF ON ON ON ON
Actuator has stopped after missing the load (no load) in the
push & hold mode
OFF OFF ON ON ON
Actuator is stopped with the servo ON in the teaching mode
OFF
ON
ON
Actuator is jogging in the teaching mode
ON
ON
ON
Actuator is being moved by hand with the servo OFF in the
teaching mode
OFF
OFF ON
Servo is OFF after home return
OFF
OFF
OFF
ON
OFF
Emergency stop has been actuated after home return
OFF
OFF
OFF
ON
(Note) Determine whether the actuator has stopped after contacting the load or missing the load from the signal
statuses of MOVE, PEND and PM1 to 8.