IAI America SCON-C User Manual
Page 230
212
Appendix
Code Error
name
Cause/Action
092 PWRT
signal
detected
during movement
Cause: The current-position write signal (PWRT) was input in the teaching
mode while the actuator was jogging.
Action: Input the PWRT signal after confirming that the jog button is not
pressed and the actuator is stopped (MOVE output signal is OFF).
093 PWRT
signal
detected
before completion of
home return
Cause: The current-position write signal (PWRT) was input in the teaching
mode when home return was not yet completed.
Action: Input the HOME signal first to perform home return, and then input the
PWRT signal after confirming that home return has completed (HEND
output signal is ON).
0A1 Parameter data error
Supported version: Up to V001A
Refer to the cold start level code “0A1” for the detailed information.
0A2 Position data error
Cause: [1] A move command was input when no target position was set in the
“Position” field.
[2] The target position in the “Position” field exceeds a soft limit
setting.
[3] An incremental target position was specified in the “Position” field
in the solenoid valve mode 2 [3-point type].
Action: [1] Set a target position first.
[2] Change the target position to a value inside the soft limit setting.
[3] Specify an absolute target position.
0A3 Position command data
error
Cause: The speed or acceleration/deceleration specified by the numerical
command exceeds the maximum value that can be set.
Action: Change the applicable setting to an appropriate value.
0A4 Command
counter
overflow
Cause: The number of input command pulses exceeded the range of -
134217728 to +134217728 (H’F8000000 to H’07FFFFFF).
Action: Raise the electronic gear ratio to increase the unit travel distance.
0A5 Electromagnetic
brake
not released
Cause: The brake cannot be released when an electromagnetic brake is
equipped.
Action: Check the 24-V electromagnetic-brake power supply.
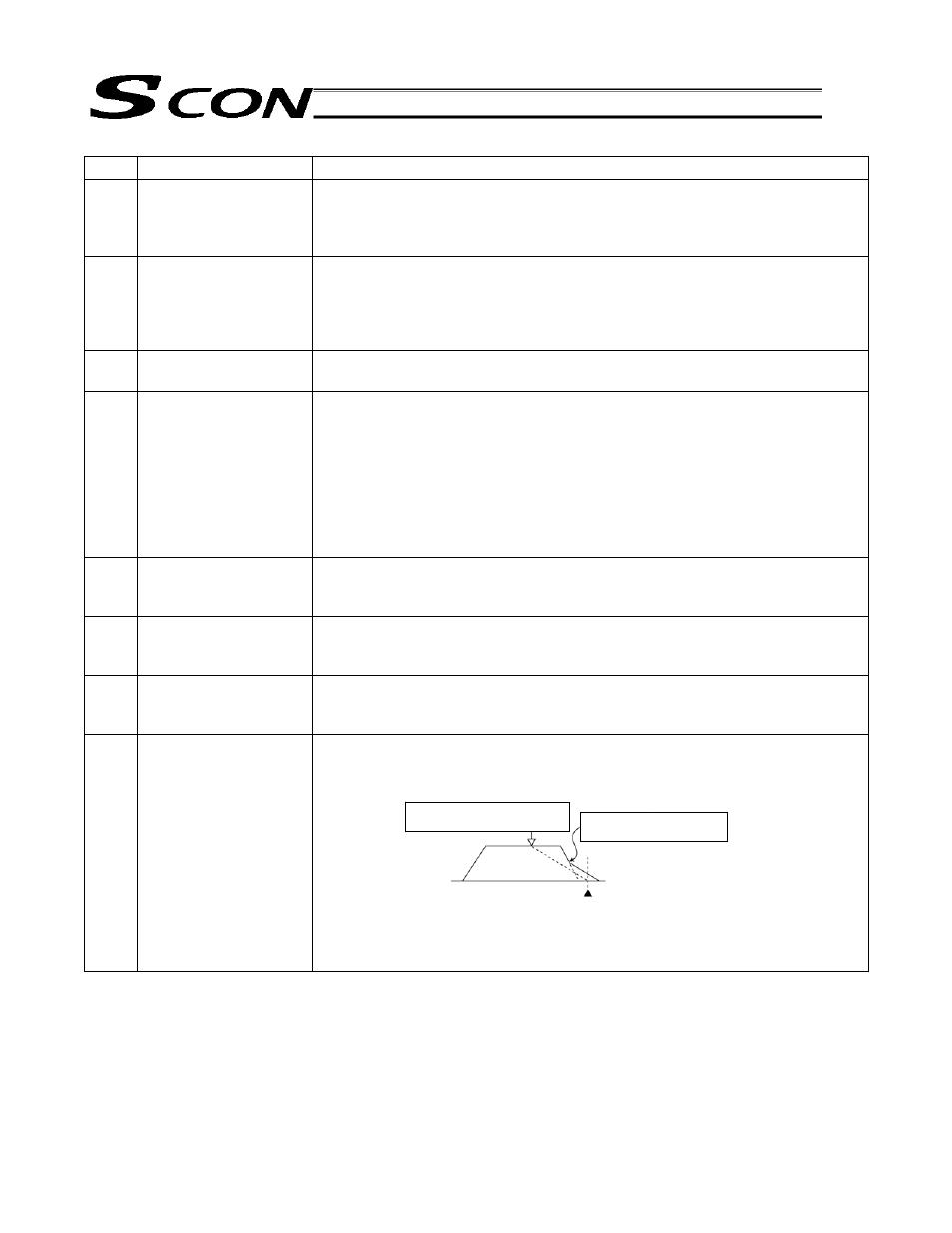
0A7 Deceleration
command
error
If a position command is issued while the actuator is moving where the target
position corresponding to the position number is located near a soft limit and
the deceleration is also set low, the actuator may move past the soft limit.
Cause: When the speed was changed during movement, the next move
command was not issued quick enough.
Action: Quicken the speed change timing so that the actuator will not
overshoot the soft limit.
Deceleration starting position not
resulting in soft limit overshoot
If a command is issued here,
soft limit overshoot will occur.
Soft limit