178 appendix – IAI America SCON-C User Manual
Page 196
178
Appendix
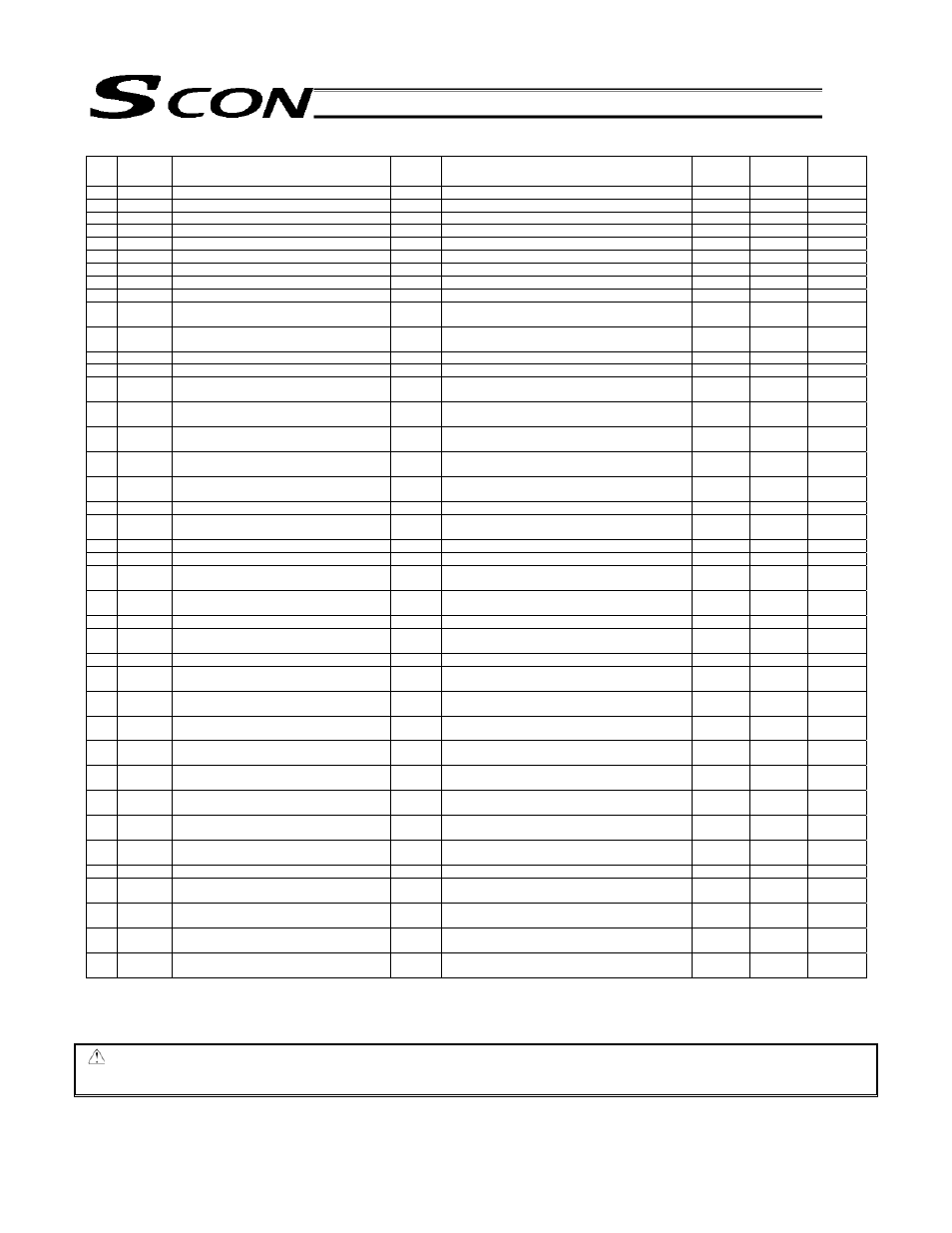
No. Category
Name
Unit
Default
factory
setting
Positioner
mode
parameter
Pulse-train
mode
parameter
Remarks
42
b
Enable function [0: Enable / 1: Disable]
-
1 [Disable]
45
c
Silent interval multiplier
time
0 [Do not apply multiplier]
46 b
Speed
override
%
100
47
b
PIO jog speed 2
mm/sec
100
48 b
PIO
inching
distance
mm
0.1
49
b
PIO inching distance 2
mm
0.1
50
b
Load output judgment time
msec
255
52
b
Default acceleration/deceleration mode
-
0 [Trapezoid]
53
b
Default standstill mode
-
0
54 d
Current-control
band
number
-
Set individually in accordance with the actuator
characteristics.
55 b
Position-command primary filter time
constant
msec
0
56 b
S-motion
ratio
setting
%
0
57 g
Torque-limiting
value
[%]
%
70
58 g
Deviation clear at servo OFF & alarm
stop [0: Disable / 1: Enable]
- 1
59 g
Deviation error monitor during torque
limiting [0: Disable / 1: Enable]
- 0
60 g
Deviation counter clear input
[0: Enable / 1: Disable]
- 0
61 g
Torque limit command input
[0: Enable / 1: Disable]
- 0
62 g
Pulse count direction
[0: Forward / 1: Reverse]
-
Set individually in accordance with the actuator
characteristics.
63
g
Command pulse input mode
-
1
64 g
Command-pulse input mode polarity [0:
Positive / 1: Negative]
- 0
65 g
Electronic
gear
numerator
-
2048
66 g
Electronic
gear
denominator
-
125
67 g
Forced stop input
[0: Enable / 1: Disable]
- 0
68 g
Feedback pulse output
[0: Enable / 1: Disable]
- 1
69 g
Feedback
pulse
pattern
-
0
70 g
Feedback pulse pattern polarity
[0: Positive / 1: Negative]
- 0
71 d
Feed-forward
gain
-
0
72 f
Timer period for emergency-stop relay
fusing monitor
msec
3000
73
f
Encoder voltage level
-
(In accordance with the specification at the time
of order)
74 f
PIO power monitor
[0: Enable / 1: Disable]
- 0
[Enable]
75 f
Electromagnetic-brake power monitor [0:
Disable / 1: Enable]
-
Set individually in accordance with the actuator
characteristics.
76
f
Belt-breaking sensor input polarity
-
Set individually in accordance with the actuator
characteristics.
77
b
Ball screw lead
mm
Set individually in accordance with the actuator
characteristics.
78
e
Axis operation type
-
Set individually in accordance with the actuator
characteristics.
79
e
Rotational axis mode selection
-
Set individually in accordance with the actuator
characteristics.
80
e
Rotational axis shortcut selection
-
0
88
a
Software limit margin
mm
Set individually in accordance with the actuator
characteristics.
89 b
Allowable time of exceeding torque
allowing continuous push & hold
sec
Set individually in accordance with the actuator
characteristics.
91 b
Current limit value at stopping due to
missed push & hold
-
0 [Current limit value during movement]
139 a Home
preset
mm
Set individually in accordance with the actuator
characteristics.
(Note) The numbers are displayed in the PC software, but not on the teaching pendant. Skipped numbers are not used and therefore omitted.
The classification codes are provided for the sake of convenience and are not displayed either in the PC software or on the teaching pendant.
(Note) For the pulse-train mode parameters corresponding to Nos. 57 to 70, refer to 5.2, “Effective Parameters in the Pulse-train Mode.” For all other
parameters, refer to 3.2, “Detail Explanation of Parameters” on the following pages in this Appendix.
Caution: When controlling the SCON controller via serial communication, always set the controller in the “positioner mode” (piano switch 1: OFF).
If it happens to be in the “pulse-train mode” by mistake, the SCON controller may operate erratically because it is operated according to
the “pulse-train mode” parameters.