2 detailed explanation of parameters, 1 parameters relating to the actuator stroke range – IAI America ERC2 User Manual
Page 145
8. Parameter Settings
122
8.2 Detailed Explanation of Parameters
If a parameter has been changed, always restart the controller using a software reset command or by reconnecting
the power.
8.2.1 Parameters Relating to the Actuator Stroke Range
z
Soft limit
Set the soft limit in the positive direction in parameter No. 3, and that in the negative direction in parameter No. 4.
The factory setting for the soft limits conforms to the effective actuator length. Change the settings, as necessary, to
prevent crash with an obstacle or when the actuator must be stroked slightly beyond its effective length.
A wrong soft limit setting will cause the actuator to crash into the mechanical end, so exercise due caution.
The minimum setting unit is “0.01 [mm].”
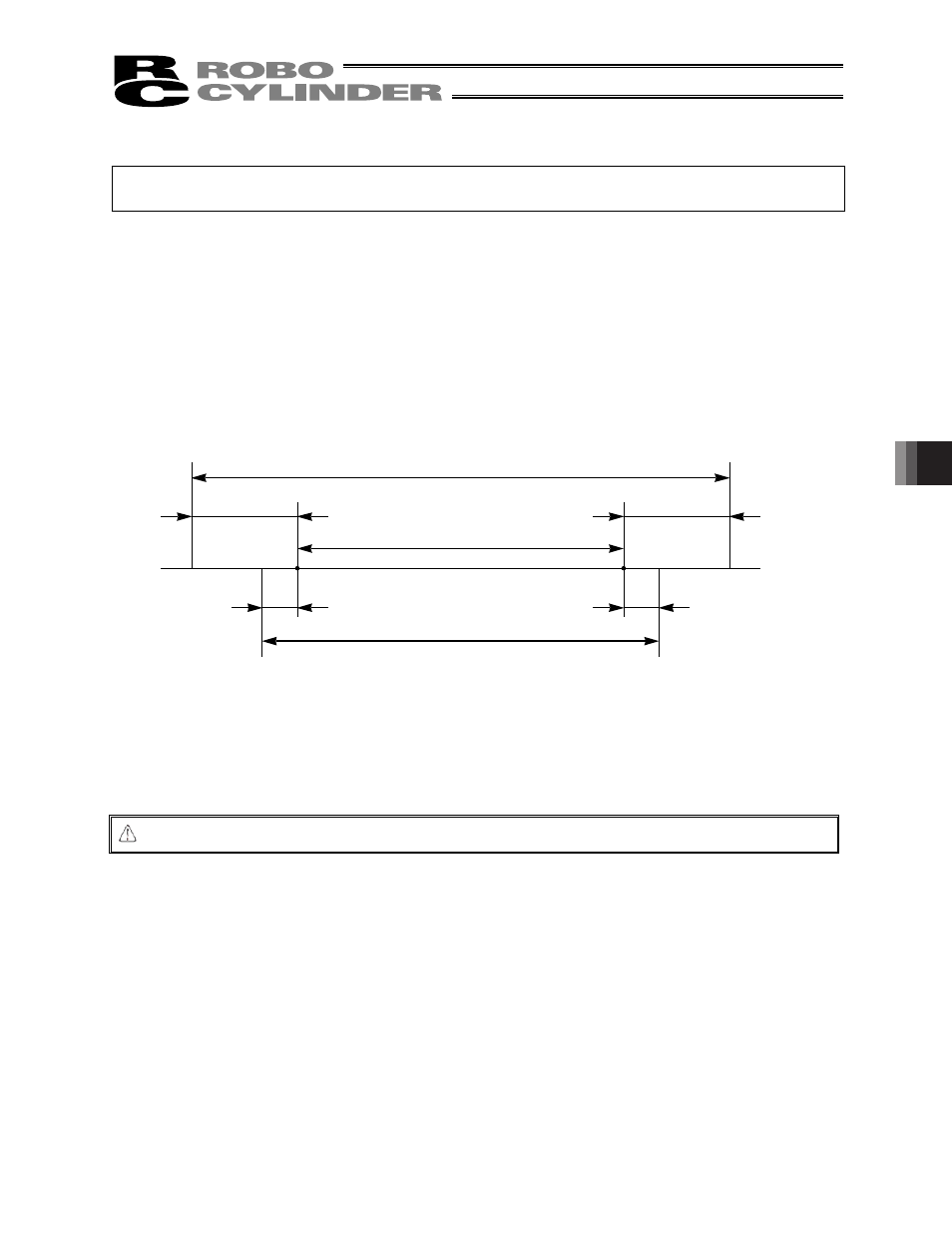
(Note) To change a soft limit, set a value corresponding to 0.3 mm outside of the effective range.
Example)
Set the effective range to between 0 mm and 80 mm
Parameter No. 3 (positive side) 80.3
Parameter No. 4 (negative side) –0.3
z
Home return direction
Unless specified by the user, the home return direction is set to the motor direction at the factory.
Should a need arise to change the home direction after the actuator has been assembled into your system, reverse
the setting in parameter No. 5 between “0” and “1.”
If necessary, also change the parameters for home return offset, soft limits and direction of excited-phase signal
detection.
Caution: The home cannot be set on the opposite side for rod-type actuators.
Soft limits set in the controller
Approx.
0.3 mm
Effective range
Allowable jogging/inching range after home return
Approx. 0.1 mm
Approx. 0.1 mm
Approx.
0.3 mm
8 0
0