IAI America ERC2 User Manual
Page 106
5. Data Entry
83
Setting method: Set one of the following values in the “Standstill mode” field of the position table:
x
Set “1”: T becomes the value of parameter No. 36.
x
Set “2”: T becomes the value of parameter No. 37.
x
Set “3”: T becomes the value of parameter No. 38.
Warning: If the next movement command is specified in the incremental mode (based on constant pitch
feed), never use the automatic servo-off mode.
The current position may deviate slightly as the servo turns off and then on again.
Caution: In push & hold operation, both the full servo control mode and automatic servo-off mode become
ineffective once the operation has completed successfully.
If the actuator has missed the work part, the specified mode becomes effective.
Basically, you should not use either the full servo control mode or automatic servo-off mode in push
& hold operation.
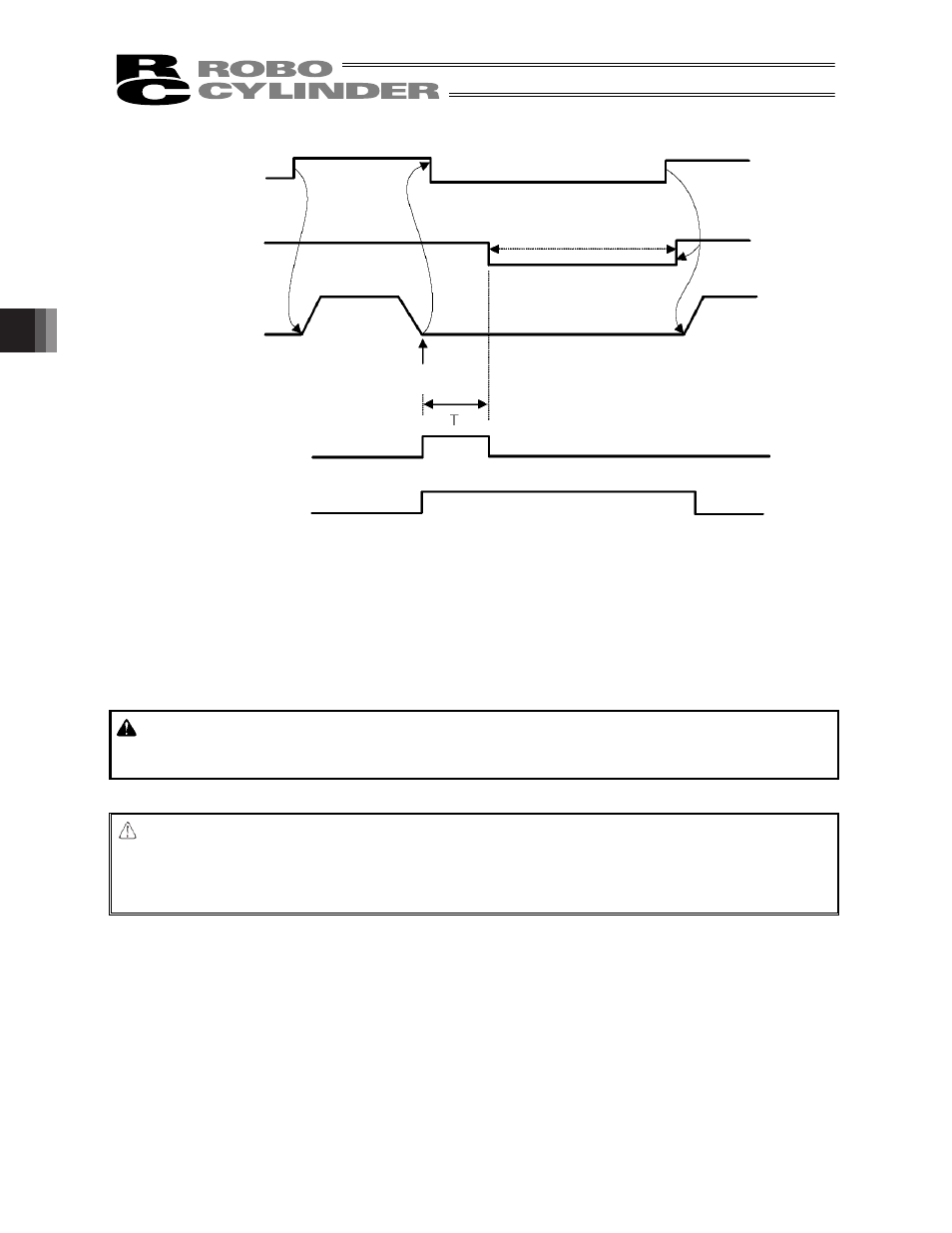
Movement
command
Servo status
Actuator
movement
Servo on
Automatic servo-off mode
(the green LED blinks)
Target position
T: Delay time after the positioning is
completed until the servo turns off (sec).
Position complete signal
(Parameter No. 39 = 0)
Position complete signal
(Parameter No. 39 = 1)