Siemens SINUMERIK 840C User Manual
Page 641
Meas.
parameter
09.95
Siemens AG 2001
All Rights Reserved
6FC5197–
j
AA50
9–20
SINUMERIK 840C (IA)
9.2.6
Position control loop (axis and spindle) – measurement
parameters (9 basic settings – as from SW 3)
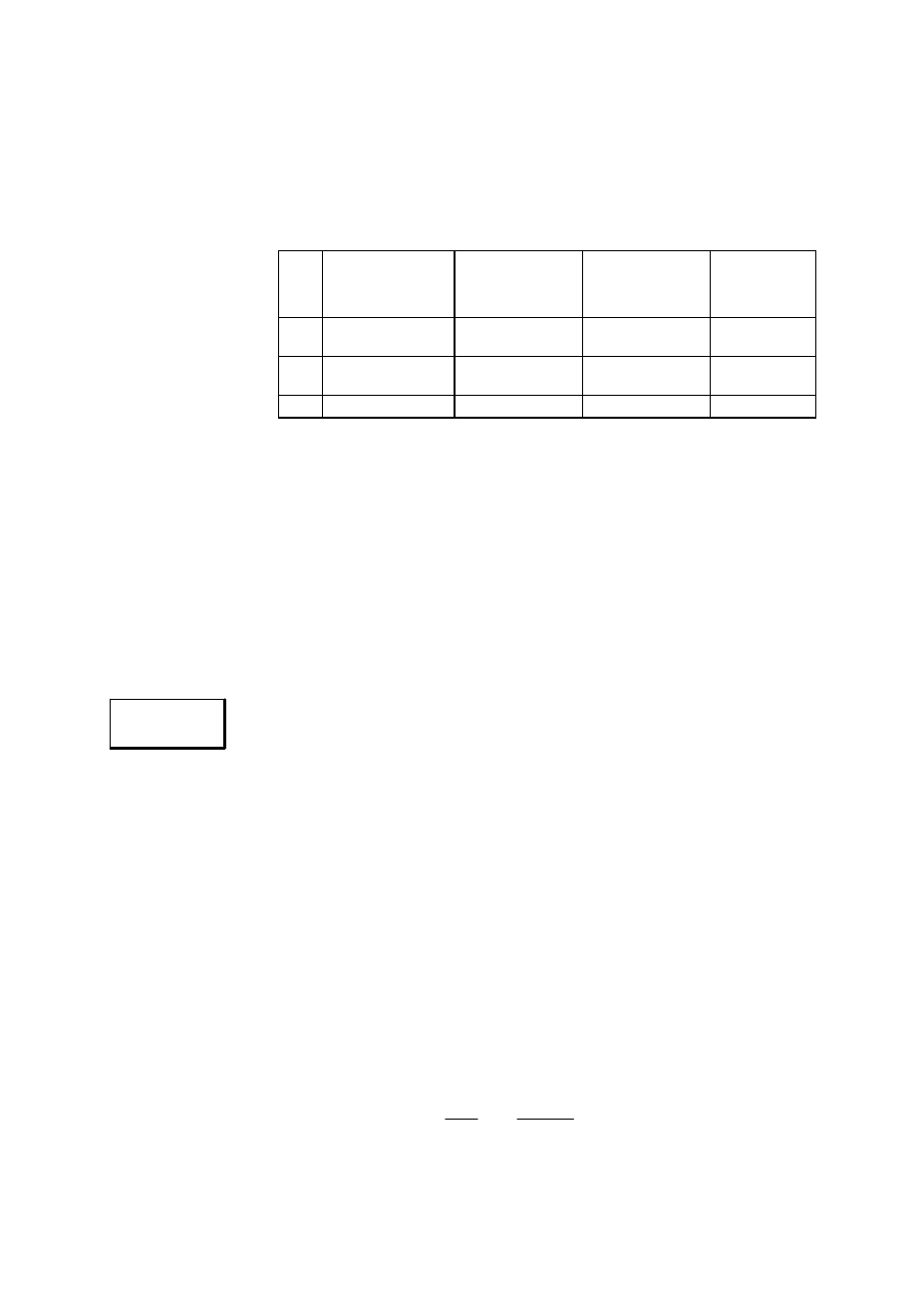
Overview of types
The types of measurement listed below are not dependent on the drive used.
of measurement
Various variables can be measured depending on the measurement type
selected.
Type of
measurement
Measured quantity
Position actual
value
Measured quantity
Following error
Measured
quantity
Speed actual
value
1.)
Frequency re-
sponse
analog / 611D
–
–
2.)
Setpoint step
change
analog / 611D
analog / 611D
analog / 611D
3.)
Setpoint ramp
analog / 611D
analog / 611D
analog / 611D
D
1st measured type: Frequency response
The frequency response measurement determines the response of the position
control loop in the frequency range. The balancing filter, KV value and feedfor-
ward control must be parameterized such that resonance is avoided wherever
possible over the entire frequency range. Excessive resonance requires
S
increase in balancing filter
S
decrease in KV value
In the case of dips in the frequency response, the setting of the feedforward
balancing filter should be reduced. If these measures do not lead to an improve-
ment, then the setpoint can be rounded by means of a smoothing filter. The
effects of this filter can be checked in the test functions in the time range (step
and ramp stimulation).
You can select the menu with the parameters for measuring the position control
loop with this softkey.
Note
You enter the measurement parameters in the selected display. These parame-
ters are managed internally as configuration data rather than machine data, i.e.
they are not initialized when the machine runs up. Data can be input in two diffe-
rent ways:
S
Manual input
S
Input by loading of an existing, complete data set with the aid of file functions
Measurement
S
Amplitude
parameter settings
This parameter determines the magnitude of the test signal amplitude.
S
Offset
The measurement requires a small speed offset of a few motor revolutions
per minute. The offset value must be set higher than the amplitude value.
S
Bandwidth
Setting of frequency range to be analyzed (must not exceed a value corres-
ponding to half the speed controller sampling frequency). The lower this va-
lue, the finer the frequency resolution will be and the longer the measurement
time.
max.band width
+
f
sampl.
2
+
1
2 x t
sampl.
e.g. 0.5 kHz with position controller sampling time of 2 ms.
9 Drive Servo Start-Up Application (as from SW 3)
9.2.6 Position control loop (axis and spindle) – measurement parameters (9 basic settings – as from SW 3)
07.97