Siemens SINUMERIK 840C User Manual
Page 482
04.96
7 Drive Machine Data (SIMODRIVE Drive MD)
7.2.2 FDD MD (data description - SW 3)
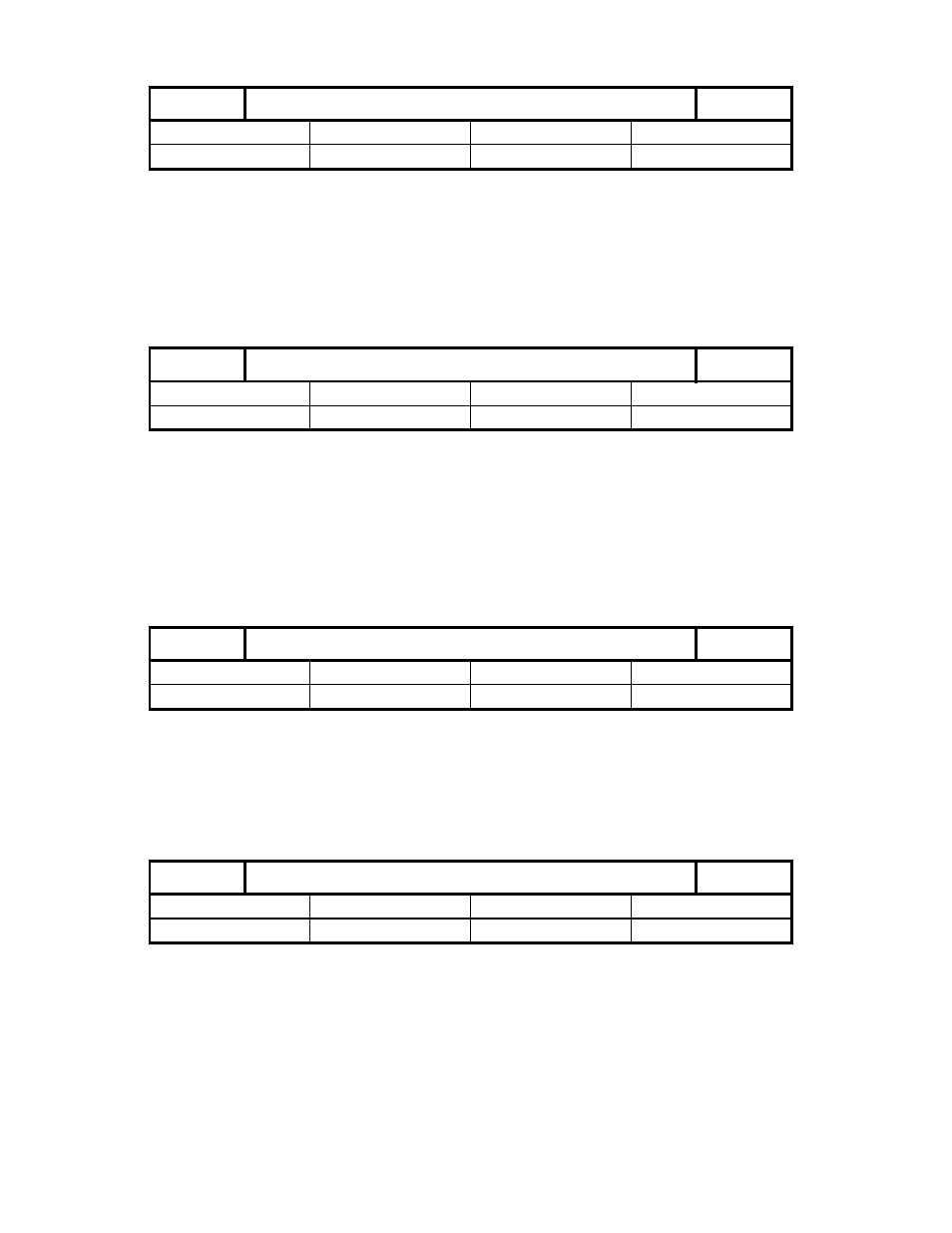
Natural frequency reference model speed control loop
1414
Default value
Lower input limit
Upper input limit
Units
0
0
8 000
Hz
Active
at once
Input of natural frequency for the "Speed control loop" reference model. The filter is
deactivated if a value of < 10 Hz is entered (proportional element with a gain of 1).
Note:
Machine data 1414, 1415 and 1416 must be set in each case to the same value for
interpolating axes.
Damping reference model speed control loop
1415
Default value
Lower input limit
Upper input limit
Units
1
0.5
5
–
Active
at once
Input of damping for the "Speed control loop" reference model. This is a reference model
(PT2) for the speed control loop with a controller of the PIR type. The higher the input value,
the stronger the damping effect.
Note:
Machine data 1414, 1415 and 1416 must be set in each case to the same value for
interpolating axes.
Symmetrization reference model speed loop
1416
Default value
Lower input limit
Upper input limit
Units
0
0
1.0
–
Active
at once
Input of symmetrization for the "Speed control loop" reference model. This machine data
simulates the calculation dead time of the speed control loop. The simulation is in this case
calculated as an approximation of an interrupted dead time. The response of the reference
model can in this way be matched to the controlled system response of the closed, P-
controlled speed control loop.
n
x
for n
act
< n
x
1417
Default value
Lower input limit
Upper input limit
Units
6000.0
0
7 200
rev/min
Active
at once
Input of threshold speed for monitoring purposes; if the actual speed value does not reach the
set threshold speed in terms of absolute value, a message is transferred to the SERVO. The
monitoring function is not activated unless the default value is changed.
©
Siemens AG 1992 All Rights Reserved 6FC5197- AA50
7–67
SINUMERIK 840C (IA)