3 limiting torques – Yaskawa Sigma II Indexer User Manual
Page 66
Sigma II Indexer User’s Manual
Settings According to Device Characteristics
5-11
Note: If the Servomotor is stopped or rotating at extremely low speed when the items above are set at 0
(dynamic brake status after stopping with the dynamic brake), then braking power is not generated
and the servomotor will stop the same as in coast status.
5.2.3 Limiting Torques
The SGDH servo amplifier limits the maximum output torque to protect the equip-
ment or workplace.
Internal Torque Limits
Maximum torque is limited to the values set in the following parameters for forward
and reverse rotation.
The torque limits are specified as a percentage of the rated torque.
Note: 1) If torque limit is set higher than the maximum torque of the servomotor, the maximum torque of
the servomotor is the limit.
2) External Torque Limits (/P-CL, /N-CL) are not available on the SGDH with the Sigma II Indexer.
Parameter
Signal
Setting
Description
Default
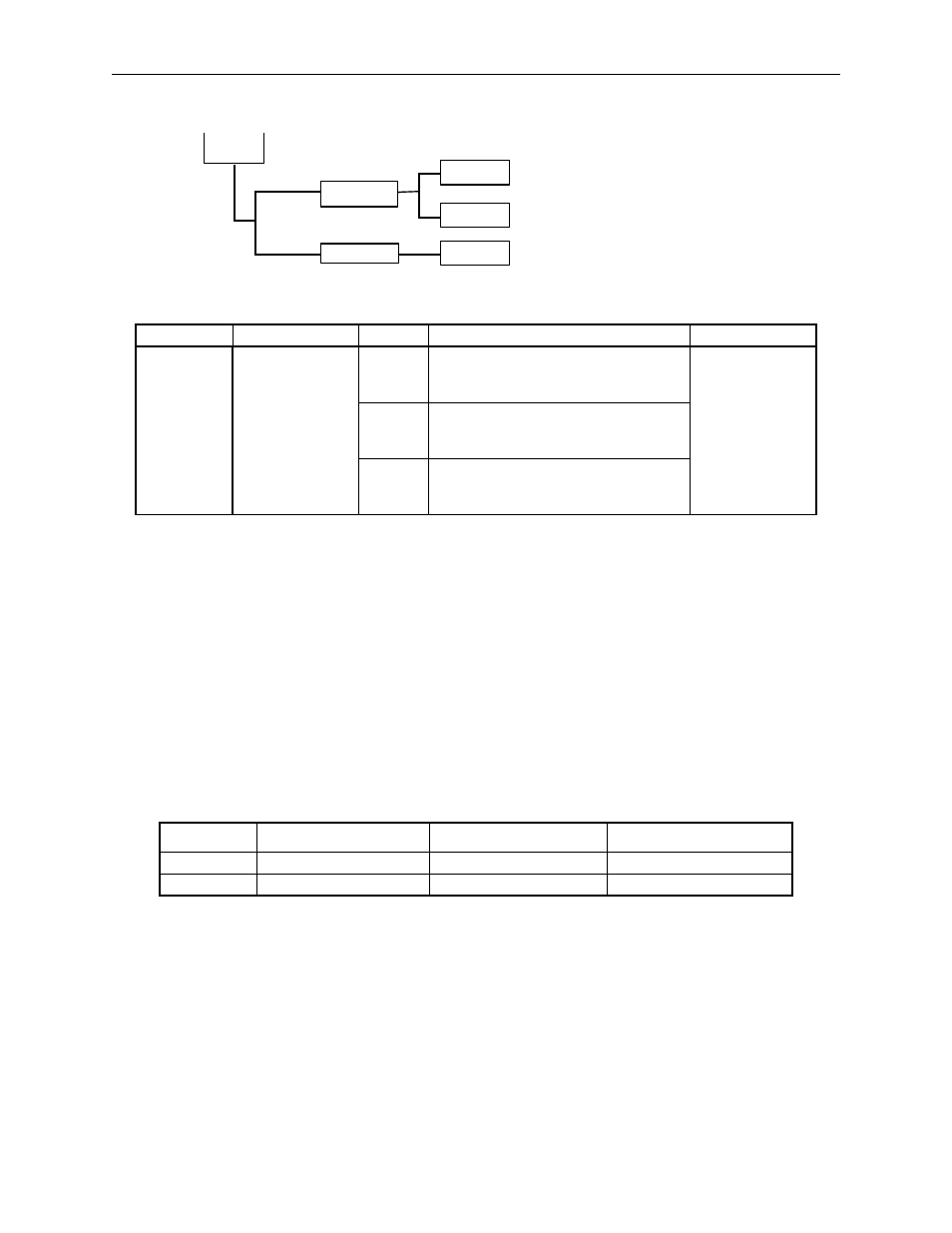
Pn001.0
Servo OFF or
Alarm Stop Mode
0
Uses the dynamic brake to stop the servo-
motor, and maintains dynamic brake status
after stopping.
0
1
Uses the dynamic brake to stop the servo-
motor, and cancels dynamic brake status
after stopping to go into coast status.
2
Coasts the servomotor to a stop. The servo-
motor is turned OFF and stops due to
equipment friction.
Parameter
Signal
Setting (%)
Default
Pn402
Forward Torque Limit
Range: 0 to 800
800
Pn403
Reverse Torque Limit
Range: 0 to 800
800
Stop Mode
After stopping
Hold with
dynamic brake
0
1
Pn001.0 = 0
or 1
Servo
OFF
Pn001.0 = 2
Stop by dynamic
brake
Coast to a stop
Coast status
Coast status
The dynamic brake stops the servomotor
electrically by shorting the motor windings
and diverting the energy to a resistor.