3 homing routine parameters – Yaskawa Sigma II Indexer User Manual
Page 125
Sigma II Indexer User’s Manual
Homing / Jog Speed Table Mode (Mode 1)
5-70
5.11.3 Homing Routine Parameters
The following parameters are used to setup the homing routines for incremental
encoders only.
Home Position, Pn 823:
Once homing is complete, the position reference is automatically set to the value set in Pn81D.
Alarm E16A will occur if Pn81D is set outside the forward and reverse position limits, Pn81B
and Pn81C, when Pn81A=1, 2, or 3 (rotary). Refer to 5.2.2 Setting the Overtravel Limit Func-
tion.
Note:
If a homing method, Pn823 is specified, then homing must be executed before the forward and
reverse position reference limits are recognized when Pn81A=0 (linear). Refer to 5.2.2 Setting
the Overtravel Limit Function.
Pn807
/JOG0
CN4-11
0 = Input Signal Closed = Jog Select
1 = Input Signal Open = Jog Select
2 = Always Jog Select
3 = No Jog Select
0
Pn808
/JOG1
CN4-13
0
Pn809
/JOG2
CN4-15
0
Pn80A
/JOG3
CN4-17
0
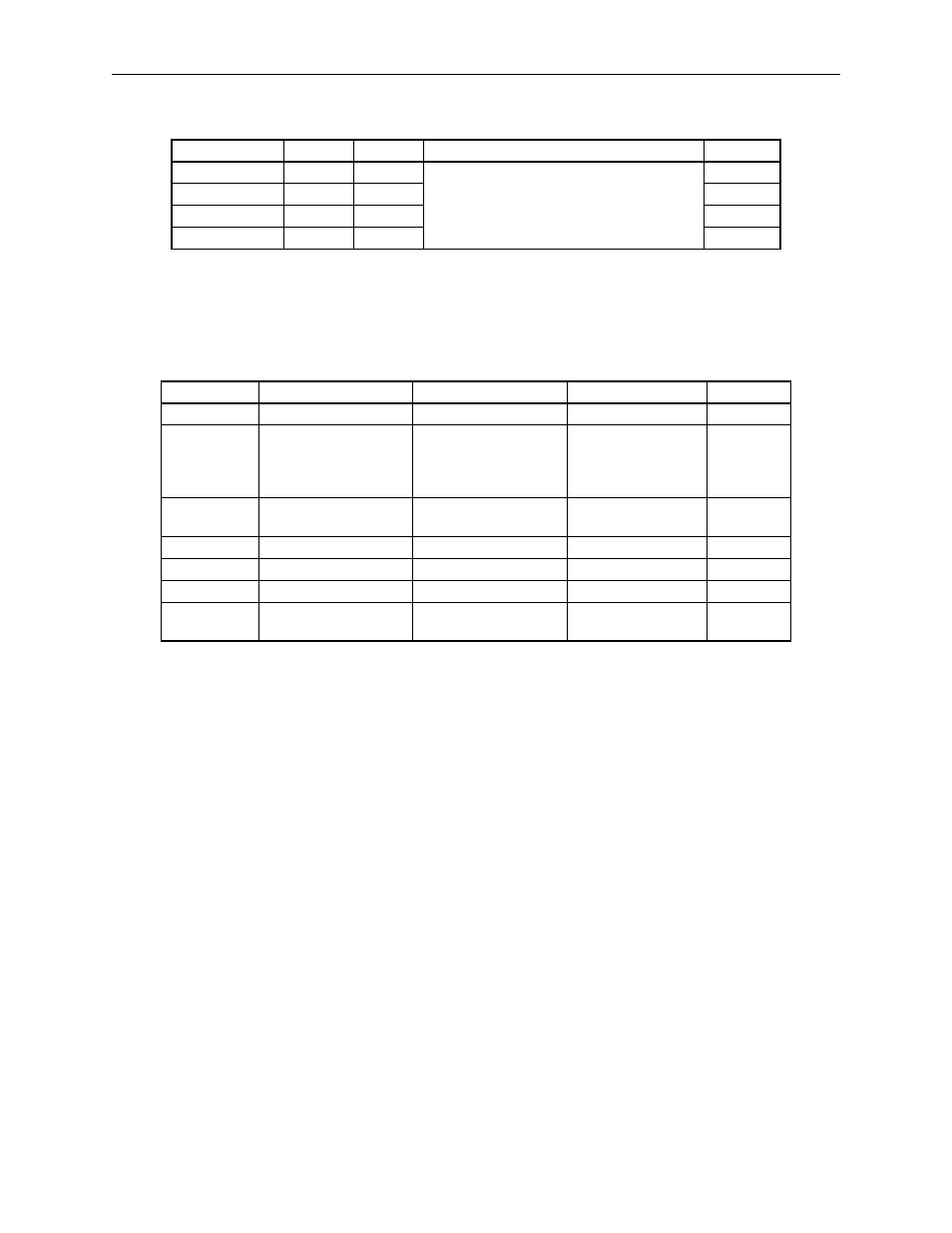
Table 5.20:
PARAMETER
SETTING RANGE
UNITS
DEFAULT
Pn81D
Home Position
-99999999~ +99999999
Ref. Units
0
Pn823
Homing Method
0 = No Homing
1 = /DEC and CØ-Pulse
2= /DEC only
3= CØ-Pulse only
-
0
Pn824
Homing Direction
0 = Forward
1 = Reverse
-
0
Pn825
Homing Move Speed
0 ~ 99999999
x1000 Ref. Unit / min.
1000
Pn826
Homing Approach Speed 0 ~ 99999999
x1000 Ref. Unit / min.
1000
Pn827
Homing Creep Speed
0 ~ 99999999
x1000 Ref. Unit / min.
1000
Pn828
Homing Final
Move Distance
-99999999 ~ +99999999
Ref. Units
0
Table 5.19:
PARAMETER
SIGNAL
PIN No.
SETTING
DEFAULT