Table 6.6: moving command – Yaskawa Sigma II Indexer User Manual
Page 142
Sigma II Indexer User’s Manual
Serial Command Functions
6-13
RS
Positioning Start with Registration
Perform positioning defined in POS, POSA, POSI command. Normally, same relative posi-
tioning is repeated by repeating RS.
When the positioning is interrupted with HOLD, restart it with RS.
Also allows for registration defined by RDST (registration distance) and RSPD (registration
speed).
Note:
1. Error E52E will occur if no registration distance is reserved.
2. If no registration speed is reserved, speed set in Pn81E is used.
3. Registration starts only after /RGRT input becomes active.
Pos:
OK
Neg:
ExxE
RS (±) nnnnnnnn
RSA (±) nnnnnnnn
(+ can be omitted)
Positioning Start with Registration (Absolute Position)
Setting Range: 99999999
d nnnnnnnn d + 99999999 [Reference Units]
Command also allows for registration. Equivalent to POS±nnnnnnnn or POSA±nnnnnnnn
o
RS
Pos:
OK
Neg:
ExxE
RSI (±) nnnnnnnn
(+ can be omitted)
Positioning Start (Relative) with Registration (Relative Position)
Setting Range: 99999999
d nnnnnnnn d + 99999999 [Reference Units]
Command also allows for registration. Equivalent to POSI ±nnnnnnnn
o RS
Pos:
OK
Neg:
ExxE
POUTnnnnn
POUT Reservation
Command to set the 5 programmable outputs.
POUT n n n n n
/POUT0
/POUT1
/POUT2
/POUT3
/POUT4
N = Non-Active
A = Active
Z = Zone signal (status of output dependent on Zone Table).
: = Maintains previous status.
Pos:
OK
Neg:
ExxE
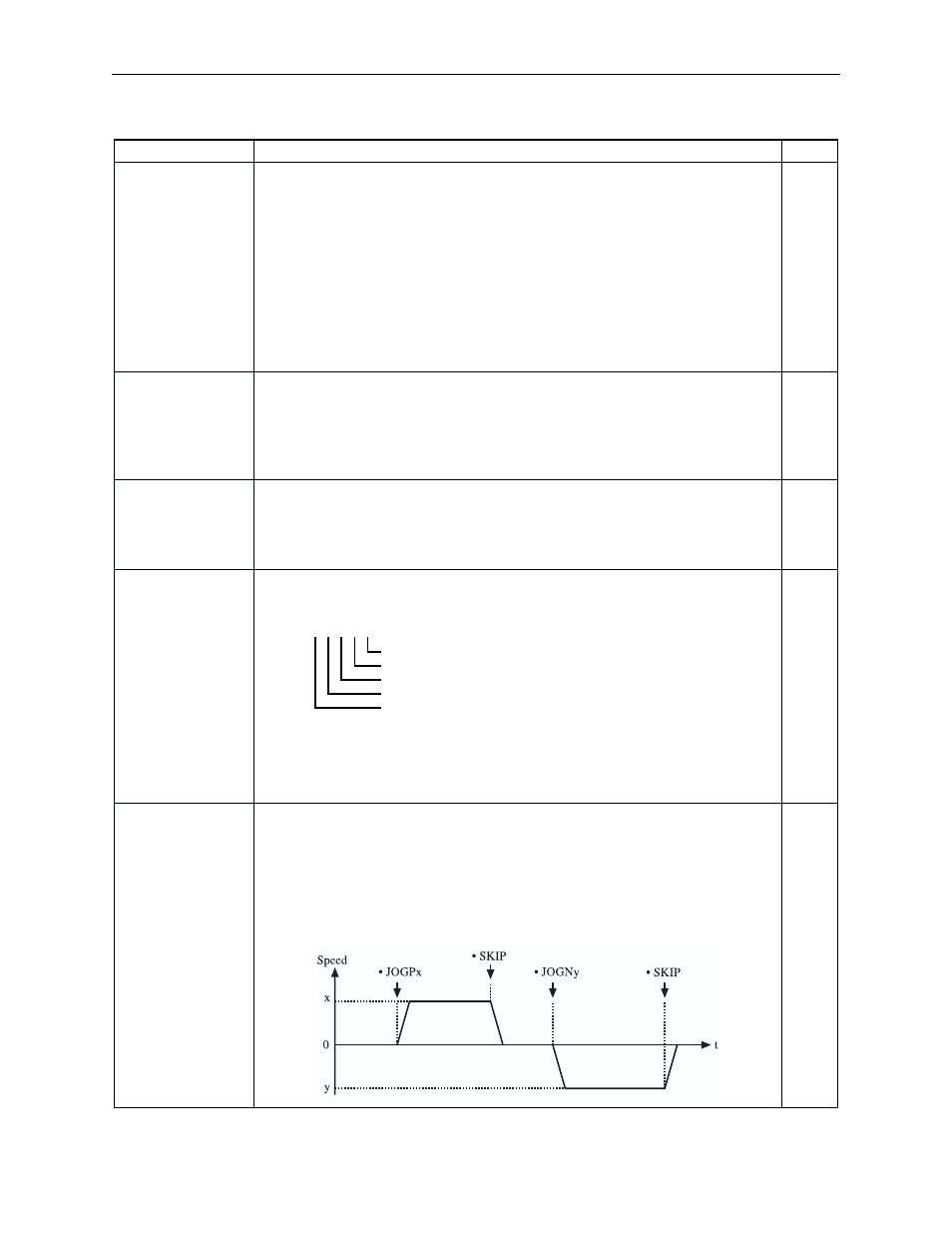
JOGPnnnnnnnn
JOGNnnnnnnnn
Jog Forward/Reverse
Setting Range: 1
d nnnnnnnn d + 99999999 [x 1000 Reference Unit/min.]
Jog operation start command.
JOGP: Jog forward at speed nnnnnnnn
JOGN: Jog reverse at speed nnnnnnnn
Pos:
OK
Neg:
ExxE
Table 6.6: Moving Command
Serial Command
Function / Description
Answer