Delta Electronics AC Servo Drive ASDA-B User Manual
Page 207
Chapter 7 Servo Parameters|ASDA-B Series
7-54
Revision February 2008, Doc. Name: 2006PDD23000009
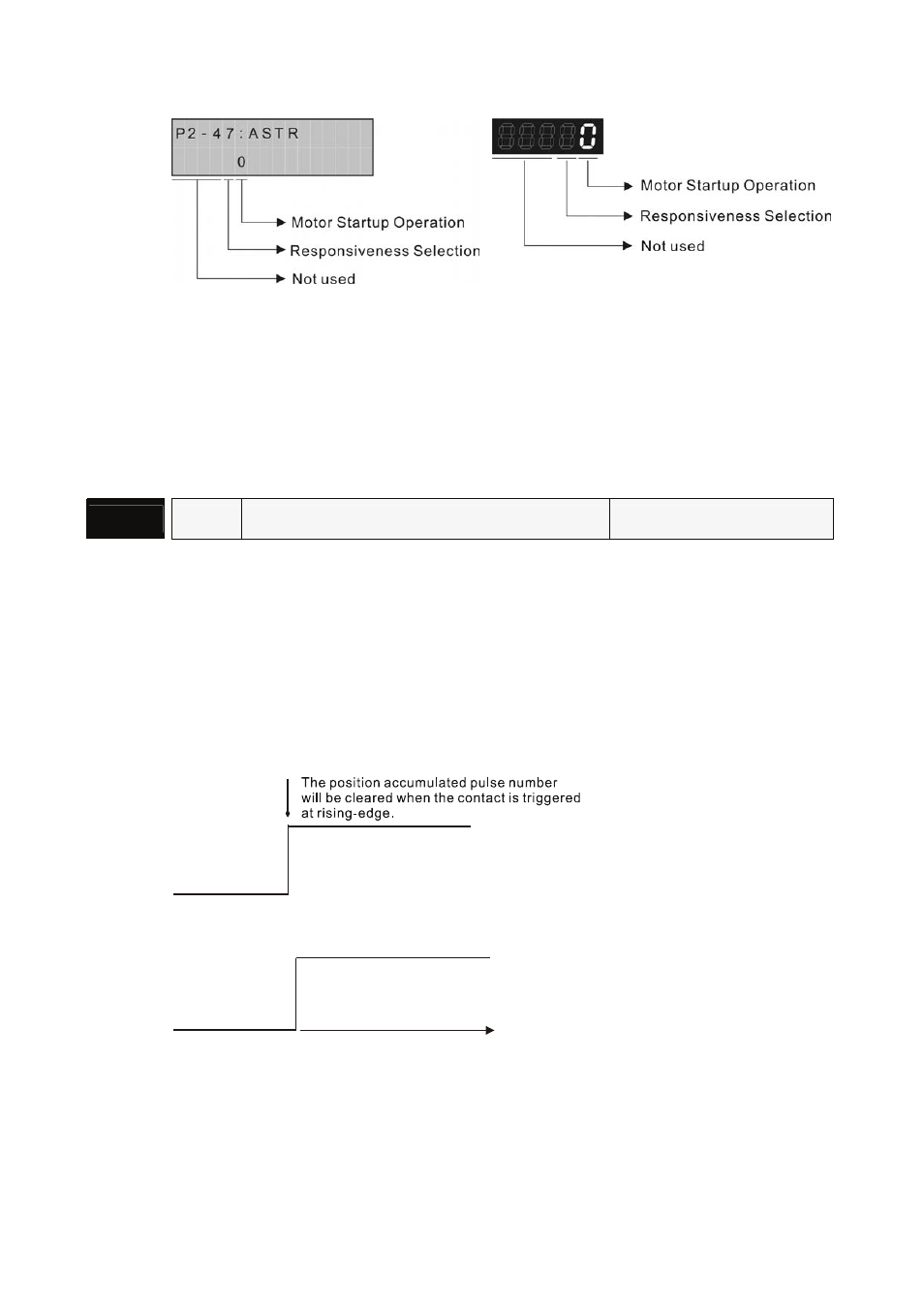
ASD-PU-01A ASD-PU-01B
• Motor Startup Operation Settings:
0: No operation. The motor does not run.
1: Motor startup operation. The motor starts to run.
• Responsiveness Selection Settings:
0: Auto-select the appropriate responsiveness according to the measured load inertia value
1: Select the responsiveness set by parameter P2-31
P2 - 48
CCLR Pulse Deviation Clear Mode
Communication Addr.: 0230H
Default: 0
Related Section:
Applicable Control Mode: P
DI CCLR(04) in Table 7.A
Unit: N/A
Range: 0 ~ 1
Settings:
When the servo drive is set to CCLR mode, the pulse deviation clear function is enabled.
0: When the input terminal is rising-edge triggered, the position accumulated pulse number will
be cleared.
CCLR
1: After CCLR is activated (ON), the position accumulated pulse number will be cleared
continuously.
The position accumulated pulse number
will be cleared continuously after CCLR
is activated (ON).
CCLR
- 1x9 Bi-Directional Transceiver Module OPBD-155F2J1R (7 pages)
- Single Mode SFP Transceiver LCP-1250B4MDRx (14 pages)
- LC-1250xxxx Series (10 pages)
- Human Machine Interface DOP-AS Series (329 pages)
- Analog Output Module DVP04DA-S (2 pages)
- DeviceNet Slave Communication Module IFD9502 (2 pages)
- LCP-155B4MSRx (12 pages)
- High-Speed PCI 12-Axis Motion Control Card PCI-DMC-B01 (528 pages)
- Network Device DVP01PU-S (2 pages)
- GBIC-1250D5MR (12 pages)
- SPBD-1250A4Q1RT (10 pages)
- SILM4015 (1 page)
- LCP-8500A4EDR (14 pages)
- 10GBASE-SR SFP+ Optical Transceiver LCP-10G3A4EDR (16 pages)
- LCP-155A4HSRx (11 pages)
- LCP-1250RJ3SR-L (9 pages)
- SILM320L (1 page)
- LCP-1250RJ3SR-S (9 pages)
- SIL530 (1 page)
- Extension Digital I/O Module DOP-EXIO28RAE (1 page)
- DVP Series PLC DVP04TC-H2 (2 pages)
- 1x9 Bi-Directional Transceiver Module OPBD-155F1J1R (7 pages)
- Distribution Box TAP-CN01/02/03 (2 pages)
- LCP-200A4HSR (9 pages)
- Pulse Generation Unit DVP01PU-H2 (2 pages)
- Power Connection Interface VFD-PSD01 (1 page)
- Programmable Logic Controller DVP04DA-H2 (2 pages)
- Single Mode SFP Transceiver LCP-1250B4QDRx (13 pages)
- LCP-155B4JSRx Series (12 pages)
- Series Temperature Controller DTD Series (2 pages)
- Brake Modules BUE Series (2 pages)
- PLC DVP Series DVP-SX (2 pages)
- Digital Keypad / Display ASD-PU-01A (1 page)
- Multimode SFP Transceiver LCP-1250A4FDRx (14 pages)
- HMU1362M (1 page)
- RPA-01 (1 page)
- THMR1395 (1 page)
- SFBD-155F2J1RM (7 pages)
- Program Transfer Module DVP-PCC01 (1 page)
- RTU-DNET (41 pages)
- AC Servo Drive ASDA-AB (37 pages)
- Digital Keypad / Display ASD-PU-01B (1 page)
- HMR1045 (1 page)
- CANopen Communication Module DVPCOPM-SL (2 pages)
- SPBD-1250B4Q1R (10 pages)