Delta Electronics AC Servo Drive ASDA-B User Manual
Page 123
Chapter 6 Control Modes of Operation|ASDA-B Series
6-8
Revision February 2008, Doc. Name: 2006PDD23000009
of mechanical system. In PDFF control AutoMode, the value of this parameter will be changed in
accordance with the setting value of parameter P2-31 automatically (Please refer Table 6.D &
6.E in Chapter 6).
P2 - 03
PFF
Smooth Constant of Position Feed Forward Gain Communication Addr.: 0203H
Default: 5
Related Section:
Applicable Control Mode: P
Section 6.2.6, P2-02
Unit: ms
Range: 2 ~ 100
Settings:
When using position smooth command, increase gain can improve position track deviation.
When not using position smooth command, decrease gain can improve the resonance condition
of mechanical system.
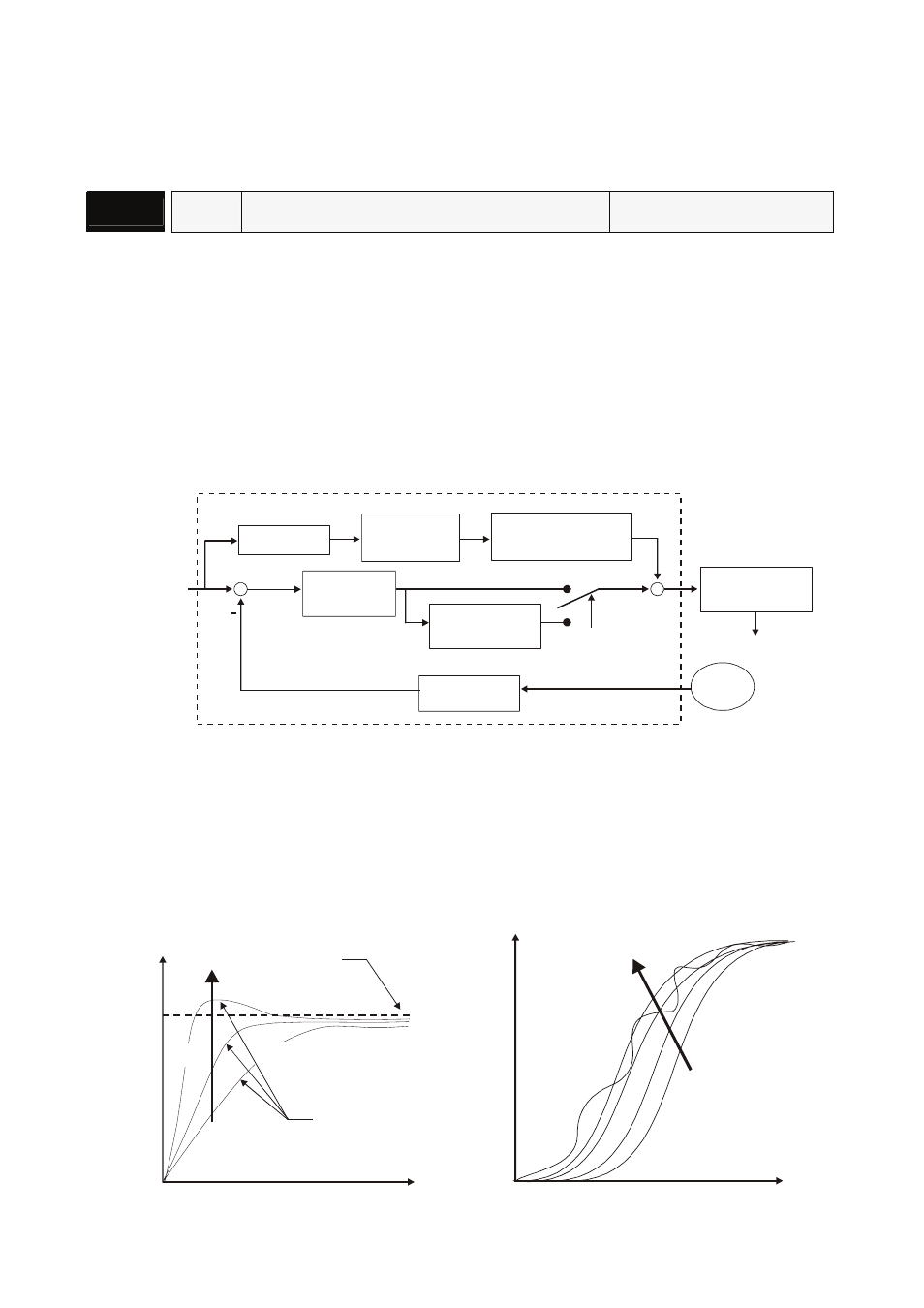
Differentiator
Position Control Block Diagram
Encoder
Position
Counter
Position Feed
Forward Gain
P2-02
Proportional
Position Loop
Gain
P2-00
Position
Command
+
Smooth Constant of
Position Feed
Forward Gain
P2-03
Position Loop
Gain Switching
Rate
P2-01
Maximum Speed
Limit
P1-55
Gain Switching
Control Selection
P2-27
Speed Command
+
+
When the value of Proportional Position Loop Gain, KPP is too great, the position loop responsiveness
will be increased and it will result in small phase margin. If this happens, the rotor of motor will oscillate.
At this time, the users have to decrease the value of KPP until the rotor of motor stop oscillating. When
there is an external torque command interrupted, over low KPP value will let the motor cannot overcome
the external strength and fail to meet the requirement of reasonable position track error demand. Adjust
feed forward gain, KPF (P2-02) to efficiently reduce the dynamic position track error.
Position
Time
KPP
(1)
(3)
Position
Command
Actual position curve
will change from (1)
to (3) following the
increasing KPP value
KPF
Position
Time