Delta Electronics AC Servo Drive ASDA-B User Manual
Page 149
Chapter 6 Control Modes of Operation|ASDA-B Series
6-34
Revision February 2008, Doc. Name: 2006PDD23000009
If the load inertia is N
× motor inertia, the regenerative power will be (N+1) × E0 when servo motor
brakes from 3000rpm to 0. Then, the regenerative resistor can dissipate: (N+1)
× E0 - Ec (joule). If the
time of repeat operation cycle is T sec, then the regenerative power = 2
× ((N+1) × E0 - Ec) / T. The
calculating procedure is as follows:
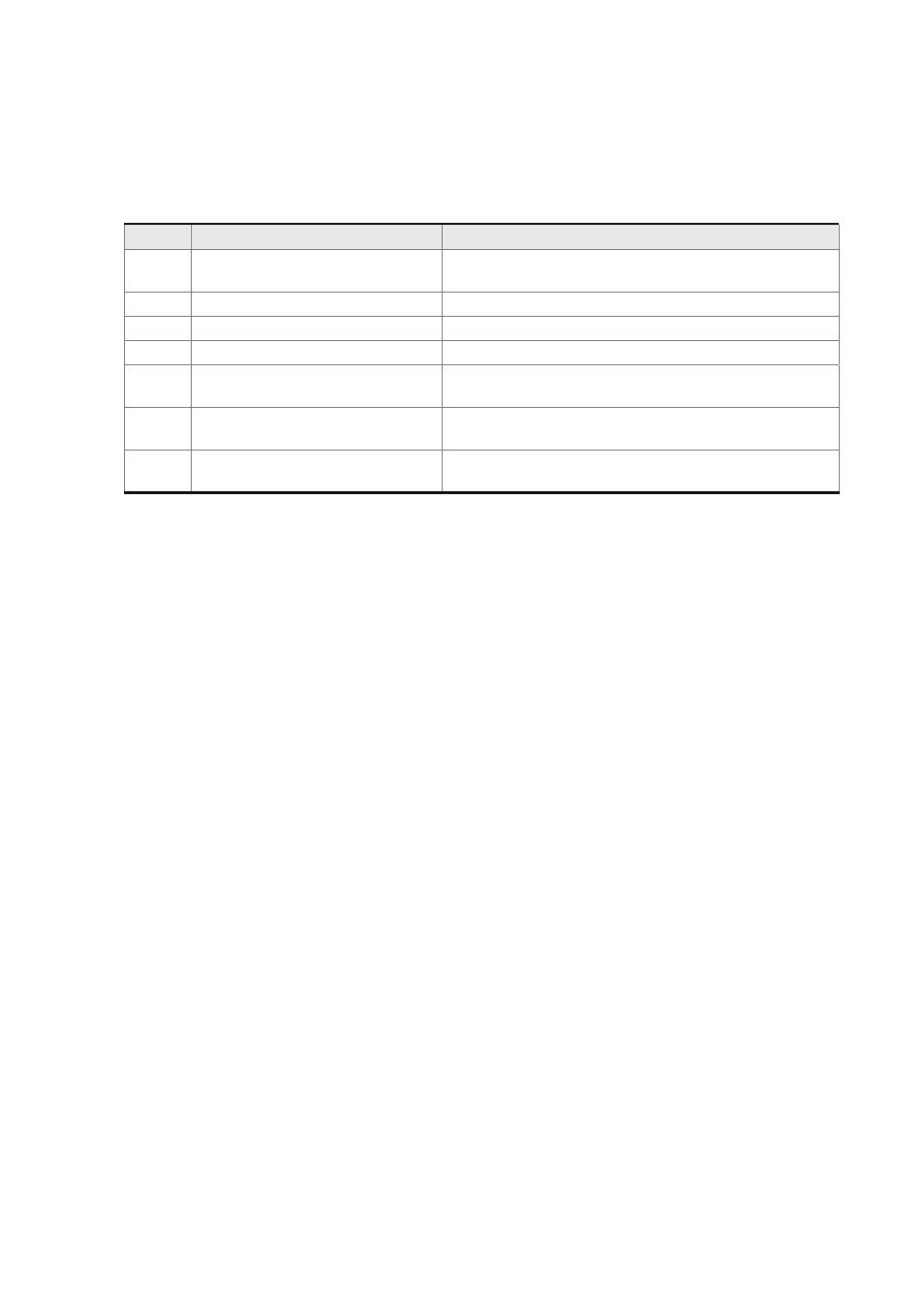
Step
Procedure
Equation and Setting Method
1
Set the capacity of regenerative
resistor to the maximum
Change the value of P1-53 to maximum
2
Set the operation cycle T
Input by the users
3
Set motor speed wr
Input by the users or read via P0-02 Drive State Display
4
Set load/motor inertia ratio N
Input by the users or read via P0-02 Drive State Display
5
Calculate the max. regenerative
power Eo
Eo= J * wr
2
/182
6
Set the regenerative power Ec that
can be absorbed
Refer to the table 6.I above
7
Calculate the required regenerative
power capacity
2 × (N+1) × Eo-Ec)/ T
Table 6.J
For example:
If we use 750W servo drive, the time of repeat operation cycle is T = 0.4 sec, max. motor speed is
3000rpm, the load inertia = 4
× motor inertia, then the necessary the power of regenerative resistor = 2
Ч ( (4+1) Ч 5.36 – 11.07) / 0.75 = 41.9W. If the calculation result is smaller than regenerative power, we
recommend the users to use the built-in 60W regenerative resistor. Usually the built-in regenerative
resistor provided by ASDA-B series can meet the requirement of general application when the external
load inertia is not excessive.
The users can see when the capacity of regenerative resistor is too small, the accumulated power will
be larger and the temperature will also increase. The fault, ALE05 may occur if the temperature is over
high. The figure on next page shows the actual operation of regenerative resistor.
(2) With Load
When there is an external load torque, servo motor is in reverse rotation when external load greater
than motor torque. Servo motor is usually in forward rotation and the motor torque output direction is the
same as the rotation direction. However, there is still some special condition. If the motor output torque
is in the reverse direction of rotation, the servo motor is also in the reverse direction of rotation. The
external power is input into the servo drive through servo motor. The figure on next page is an example.
The users can see the motor is in forward rotation at constant speed when a sudden external load
torque change and great power is transmitted to regenerative resistor rapidly.