6 others, 1 speed limit, 2 torque limit – Delta Electronics AC Servo Drive ASDA-B User Manual
Page 146: 6 others -31, 1 speed, Limit -31, 2 torque limit -31, 6 others 6.6.1 speed limit
Chapter 6 Control Modes of Operation|ASDA-B Series
Revision February 2008, Doc. Name: 2006PDD23000009
6-31
6.6 Others
6.6.1 Speed Limit
The max. servo motor speed can be limited by using parameter P1-55 no matter in position, speed or
torque control mode.
The command source of speed limit command is the same as speed command. It can be the external
analog voltage but also can be internal parameters (P1-09 to P1-11). For more information of speed
command source, please refer to chapter 6.3.1.
The speed limit only can be used in torque mode (T mode) to limit the servo motor speed. When the
torque command is the external analog voltage, there should be surplus DI signal that can be treated as
SPD0~1 and be used to select speed limit command (internal parameter). If there is not enough DI
signal, the external voltage input can be used as speed limit command. When the Disable / Enable
Speed Limit Function Settings in parameter P1-02 is set to 1, the speed limit function is activated.
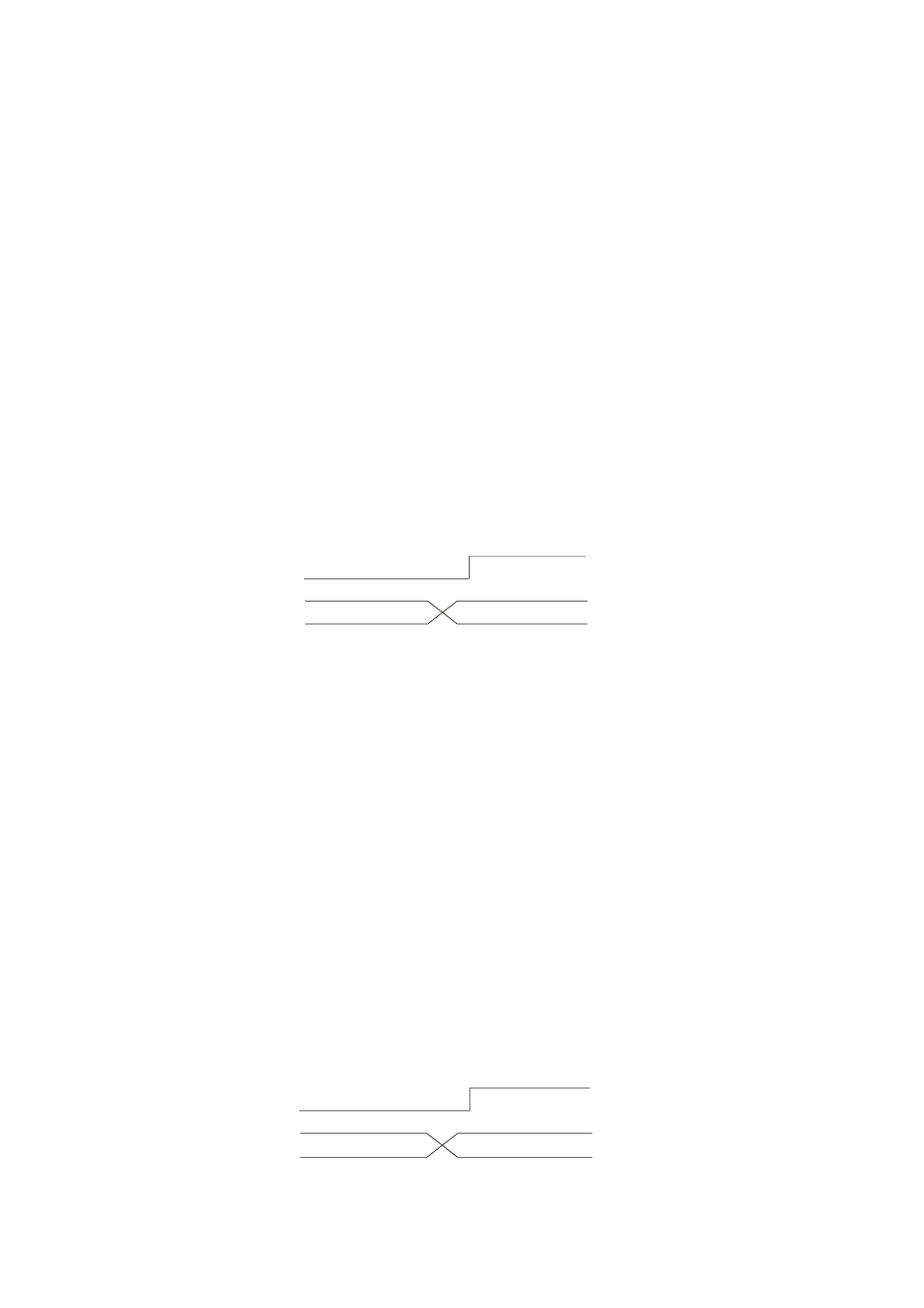
The timing chart of speed limit is shown as the figure below:
Disable / Enable Speed Limit Function
Settings in parameter P1-02 is set to 1
SPD0~1 INVALID
SPD0~1 VALID
Disable / Enable Speed Limit Function
Settings in parameter P1-02 is set to 0
Command Source Selection of Speed Limit
6.6.2 Torque Limit
The command source of torque limit command is the same as torque command. It can be the external
analog voltage but also can be internal parameters (P1-12 to P1-14). For more information of torque
command source, please refer to chapter 6.4.1.
The torque limit only can be used in position mode (P mode) and speed mode (S mode) to limit the
output torque of servo motor. When the position command is the external pulse and speed command is
the external analog voltage, there should be surplus DI signal that can be treated as TCM0~1 used to
select torque limit command (internal parameter). If there is not enough DI signal, the external voltage
input can be used as torque limit command. When the Disable / Enable Torque Limit Function Settings
in parameter P1-02 is set to 1, the torque limit function is activated.
The timing chart of torque limit is shown as the figure below:
TCM0~1 INVALID
TCM0~1 VALID
Disable / Enable Torque Limit Function
Settings in parameter P1-02 is set to 1
Disable / Enable Torque Limit Function
Settings in parameter P1-02 is set to 0
Command Source Selection of Torque Limit