5 control modes selection, 1 speed / position control mode selection, 5 control modes selection -29 – Delta Electronics AC Servo Drive ASDA-B User Manual
Page 144: Speed / position control mode selection -29
Chapter 6 Control Modes of Operation|ASDA-B Series
Revision February 2008, Doc. Name: 2006PDD23000009
6-29
6.5 Control Modes Selection
Except signal control mode operation, ASDA-B series AC drive also provide S-P, S-T, T-P these three
multiple modes for the users to select.
1) Speed / Position mode selection: S-P
2) Speed / Torque mode selection: S-T
3) Torque / Position mode selection: T-P
Mode
Name
Code
Description
S-P
06
Either S or P control mode can be selected via the Digital Inputs (DI)
S-T
10
Either S or T control mode can be selected via the Digital Inputs (DI)
Dual Mode
T-P
07
Either T or P control mode can be selected via the Digital Inputs (DI)
Table 6.G
Sz and Tz mode selection is not provided. In order to avoid using too much DI inputs, we recommend that
the users can use external analog signal as input command in speed and torque mode to reduce the use of
DI inputs (SPD0~1 or TCM0~1).
Please refer to table 3.B and table 3.C in section 3.3.2 to see the default pin number of DI/DO signal.
6.5.1 Speed / Position Control Mode Selection
S-P Mode:
The command source of S-P mode is from external input pulse. The speed command can be the
external analog voltage or internal parameters (P1-09 to P1-11). The speed and position mode
switching is controlled by the S-P signal.
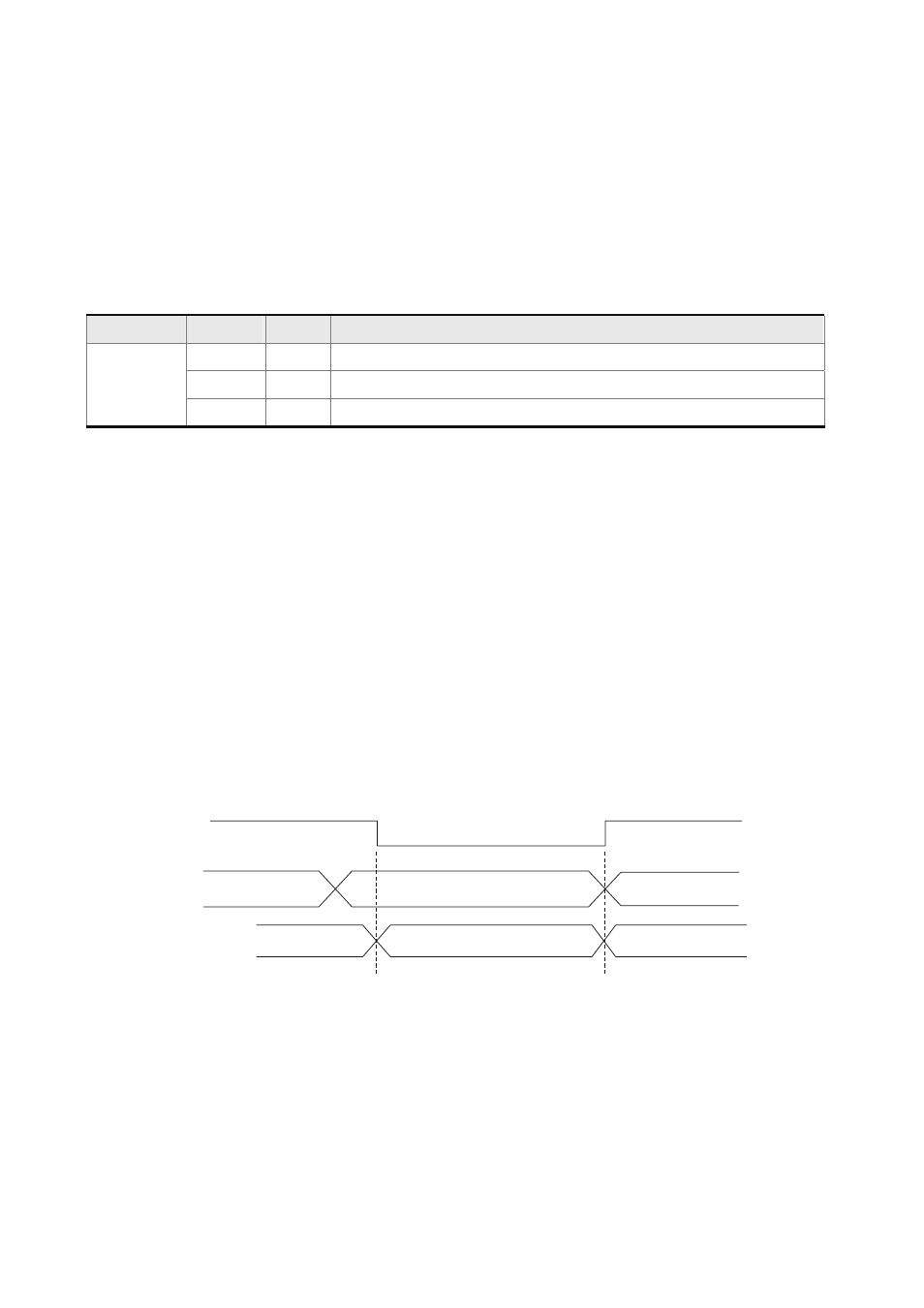
The timing chart of speed / position control mode selection is shown as the figure below:
ON
NOT CARE
Speed source is determined
by SPD0~1
Counting Pulse
Position Mode
NOT CARE
OFF
ON
S-P
Speed Mode
Position Mode
Counting Pulse
Stop Counting Pulse
In position mode (when S-P is ON), the motor will start to count pulse and operate following the external
pulse command. When switching to the speed mode (when S-P is OFF), it will stop counting pulse even
if the pulse command is continuously sent out. The speed command is determined by SPD0~1 and the
motor will rotate following the command. After S-P is ON again, it will immediately return to position
mode.