Rockwell Automation 7000L PowerFlex Medium Voltage AC Drive (C Frame) - Classic Control User Manual
Page 502
7-18
Troubleshooting
7000L-UM300I-EN-P – June 2013
7000 “C” Frame
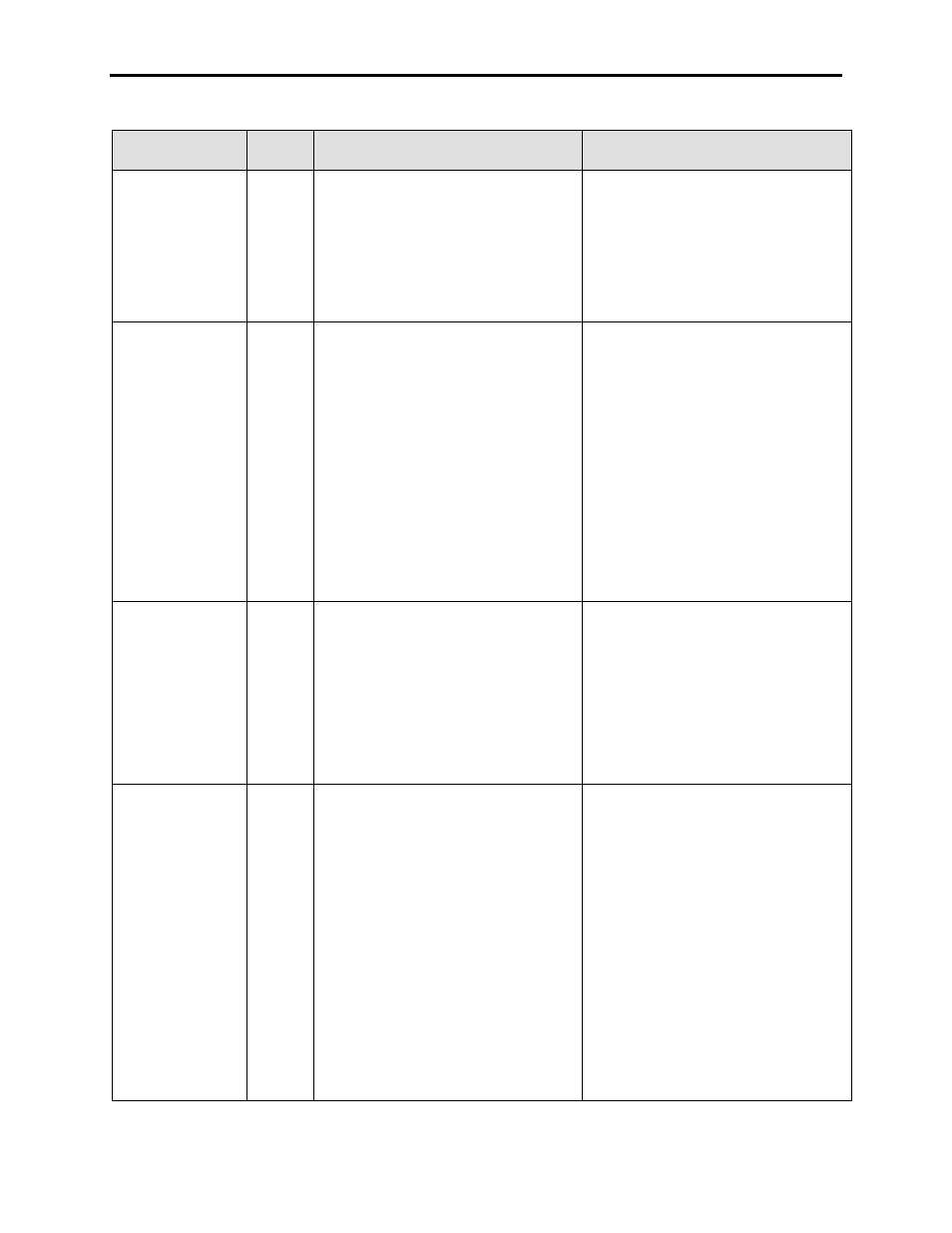
FAULT
MESSAGE
FAULT
CODE
DESCRIPTION
RECOMMENDED ACTIONS
Motor OV
22
The measured Motor AC Voltage has
exceeded Motor Overvoltage Trip (P181) for
the duration set in Motor Overvoltage Delay
(P182).
Possible Causes:
– Parameter setting incorrect (flux
command/trip values)
– VSB damage – Check VSB resistors,
grounds, and verify tap settings are
correct
– Self-Excitation – Check for flying
start/induced motor rotation
Motor Overspeed
66
The motor Speed Feedback (P289) has
exceeded Motor Overspeed Trip (P185) for
the duration set in Motor Overspeed Delay
(P186).
– Check for unbalance on the motor and
line feedback voltages
– Improper Settings – Check parameter
settings for Reference Command
Maximum and Ensure it is not too close
to Overspeed Trip increase
– Adjust Speed Regulator Bandwidth to
control overshoot, and ensure
acceleration rate near maximum speed is
not too great
– Check for load transients
– For Tachometers, ensure the ppr is set
properly and the feedback is valid
– Check tachometer pulse train with an
oscilloscope
Motor Protection
138
Standard External Fault/Warning Input
included to allow the end-user to install a
protective relay (IE Bulletin 825 Motor
Protection Relay) auxiliary contact that can
activate a drive fault or warning, depending
on configuration of Motor Prot Class (P443).
– Check device responsible for the
auxiliary contact to this input and
investigate the fault indicated by the
device‟s fault message
– Investigate internal and external causes
for this fault code
– Check the 120V signal through the
external device
– Check the XIO board inputs and
parameter status bits
Motor Stall
23
The drive has detected a motor stall
condition, with a delay set by Motor Stall
Delay (P191). The different methods of
Motor Stall detection depend on whether a
tachometer/encoder is installed or not.
Sensorless faults involve the motor not
building up enough flux feedback to be
detected by the drive, while tachometer
feedback methods look at the difference
between the tachometer/encoder feedback
and the speed command.
Possible Causes:
– Insufficient torque on starting– Increase
Torque Command 0 and 1 to avoid motor
stalls when starting if Speed Feedback
Mode is Sensorless
– Insufficient torque – Increase Torque
Limit Motoring to avoid motor stalls while
running
– Reverse Load Rotation – Ensure the
load is not rotating in the opposite
direction
– Increase motor stall delay
– Ensure Tachometer Feedback is
functional where applicable
– Ensure the motor is not spinning forward
at a speed greater than Reference
Command