3 structure, Structure, Preface and general information – Lenze ECSCMxxx User Manual
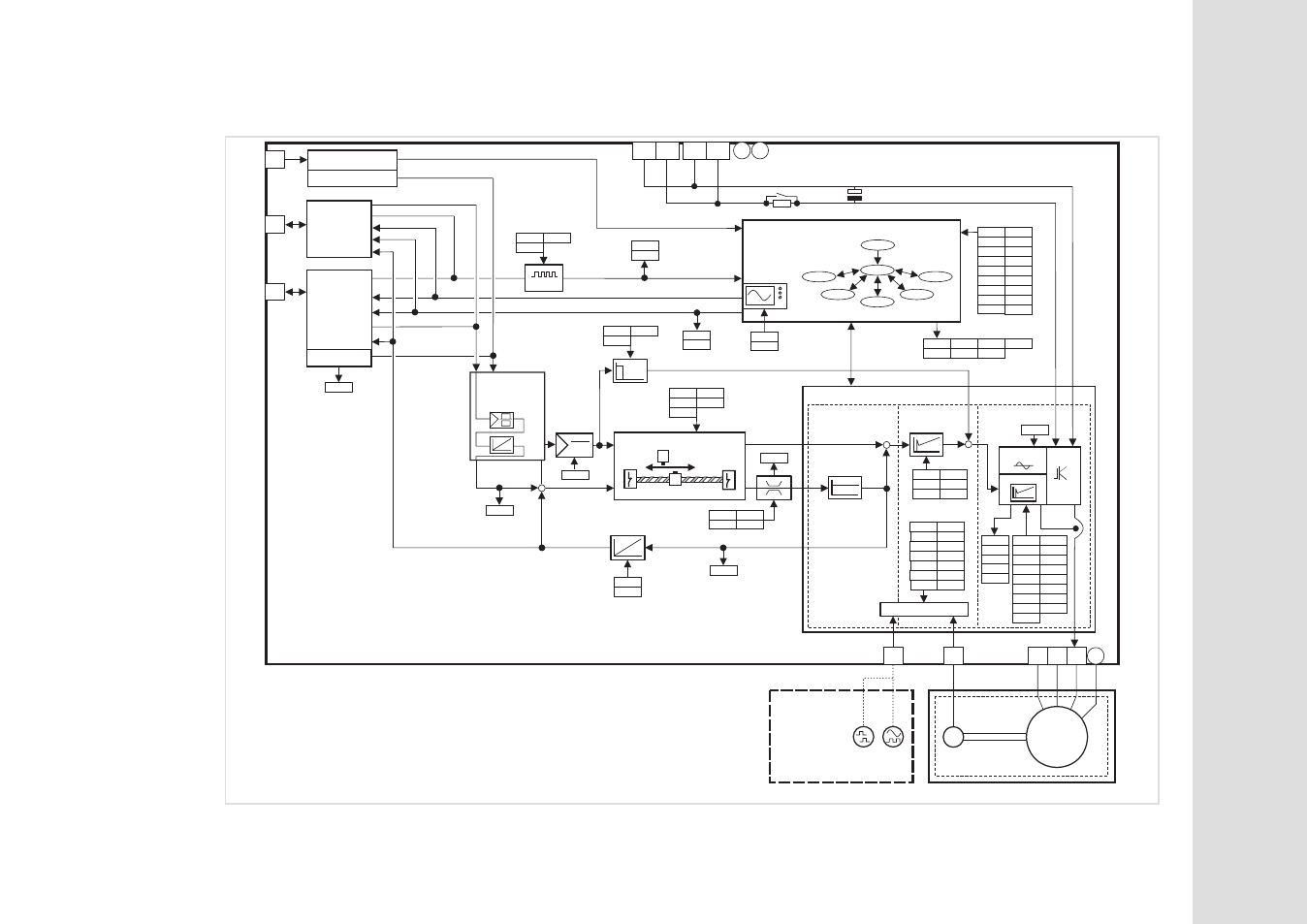
Page 15: Ecsxm, Fig. 1−1 structure of the ecs application "motion
Preface and general information
Structure
1
l
15
EDBCSXM064
EN 11.0
1.3
Structure
TTL encoder
Sin/cos encoder
Motor
M
3~
R
PWM
VEC CTRL
Motor control
Position
control
Speed
control
Current/torque
control
62.5 s
m
16 bits
16 bits
32 bits
X4
ECSxM
CAN_IO
CAN_SYNC
+
C0011
*
Fine
interpolation
Digital_IO
Control word
Status word
Homing
Drive control
Set position
(32 bits)
Actual position (32 bits)
Monitor data
Feedback
Toggle bit
-
X6
C3165
C3162
C3161
C3160
C3153
C3152
C3151
C3150
C3181
C3180
Init
IP-Mode
Stand by
VelMode
C0579
C0576
C0135
C0150
UG+ UG- UG+ UG- PE PE
C0936
C0935
C3011
C3010
C3012
C3421
C3420
C3422
C3034
C3032
C3030
C3033
C3031
+
+
C3430
*
250 s
m
1000 s
m
X7
X8
PE
W
V
U
alternative
C3008
C3002
C3211
C3210
C3201
C0136
C0497
C0011
C0051
C0022
C0074
C0076
C0078
C0081
C0085
C0088
C0090
C0023
C0075
C0077
C0080
C0084
C0087
C0089
C0091
C0053
C0079
C0082
C0083
C0092
C0018
C0019
C0071
C0105
C0070
C0072
C0030
C0095
C0416
C0420
C0427
C0491
C0540
C0058
C0098
C0419
C0421
C0490
C0495
C3001
C0050
C0909
C4018
Trouble
Homing
ManJog
C3009
C3012
C3011
C3010
C3021
C3020
C3022
C3170
C3038
C3037
C5000
C3175
C3200
C5001
C4011
X1
AIF_IO
DI1: EtherCAT_SYNC
C4010 = 2
(AIF)
C4010 = 0
(CAN)
ECSXA502
Fig. 1−1
Structure of the ECS application "Motion"