Quick stop (qsp), 11 quick stop (qsp), 9300 servo plc – Lenze DDS Target 9300 Servo PLC V8.x User Manual
Page 69: System blocks, Stop
9300 Servo PLC
System blocks
2.12
MCTRL_MotorControl (node number 131)
2−63
L
9300 Servo PLC EN 5.1
2.12.11
Quick stop (QSP)
The QSP function is used to stop the drive independently of the selected setpoint within an adjustable
time interval.
·
The QSP function is active if MCTRL_bQsp_b is set = TRUE.
·
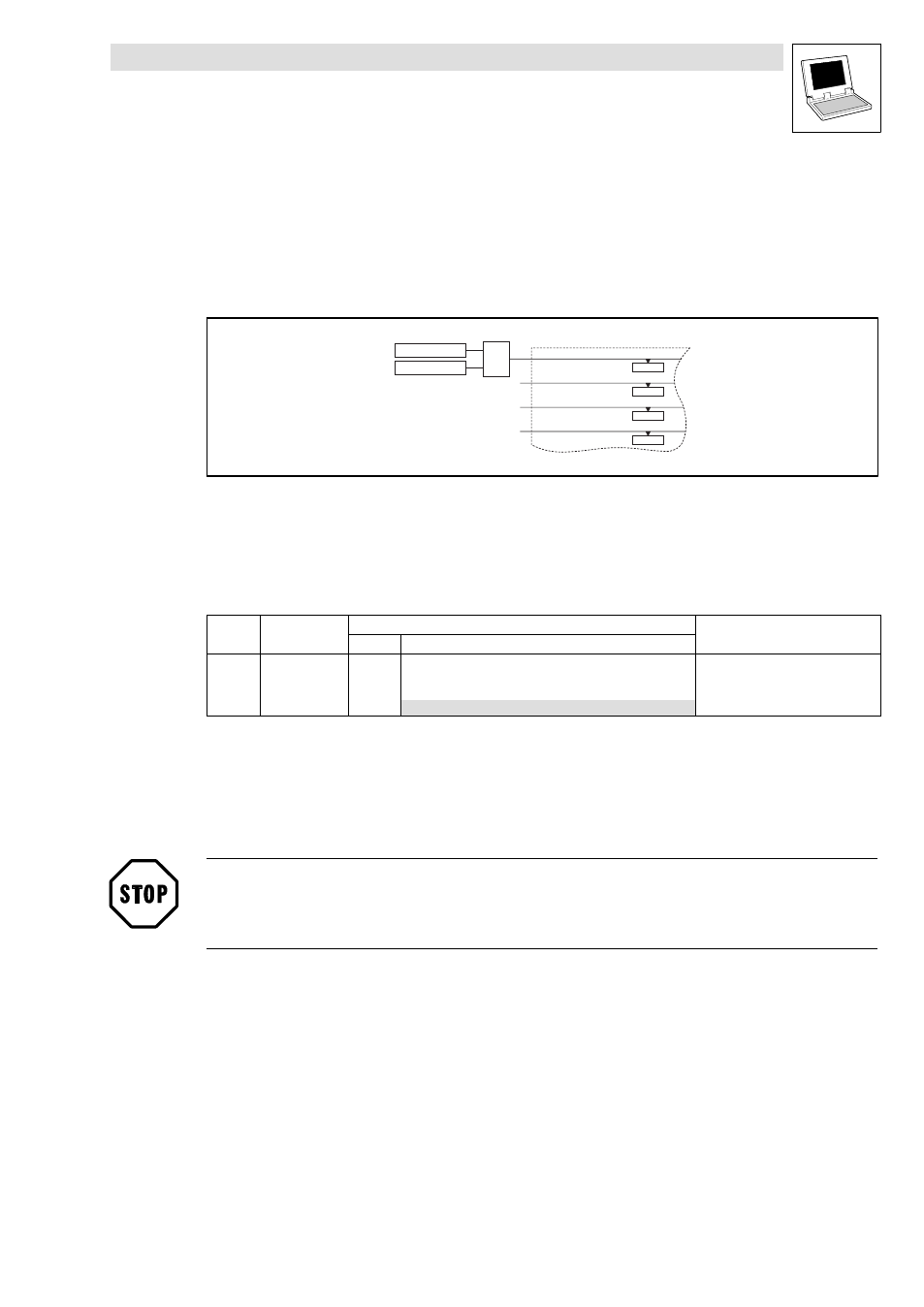
If the SB DCTRL_DriveControl is to trigger QSP, the QSP function must be programmed as
follows:
MCTRL_bQspOut_b
MCTRL_bNMSwt_b
MCTRL_nLoMLim_a
MCTRL_nHiMLim_a
C0907/3
C0906/4
C0906/3
C0907/2
OR
DCTRL_bQspIn_b
Any Variable
Fig. 2−25
Programming of the QSP function if SB DCTRL_DriveControl is to trigger QSP
Function:
·
If torque control is selected, it will be deactivated. The drive is controlled by the speed
controller.
·
Speed is reduced to 0 within the deceleration time set under C0105:
Code
LCD
Possible settings
Info
Lenze
Selection
C0105 QSP Tif
0.000
Deceleration time for quick stop (QSP)
·
Referred to speed change
n
max
... 0
.
0.000
{0.001 s}
999.900
·
The torque limits MCTRL_nLoMLim_a and MCTRL_nHiMLim_a are deactivated, i.e. the drive is
operated with
±
100 %.
(
^ 2−58)
·
The phase controller is activated. If the rotor position is shifted actively, the drive generates a
torque against this displacement if
– C0254 is set non−zero,
– MCTRL_nPosLim_a is triggered with a value > 0 %.
Stop!
If the field is weakened manually (MCTRL_nFldWeak_a < 100 %), the drive cannot supply the
maximum torque.