Outputs_mctrl, 9300 servo plc, System blocks – Lenze DDS Target 9300 Servo PLC V8.x User Manual
Page 61: 2 outputs_mctrl
9300 Servo PLC
System blocks
2.12
MCTRL_MotorControl (node number 131)
2−55
L
9300 Servo PLC EN 5.1
2.12.2
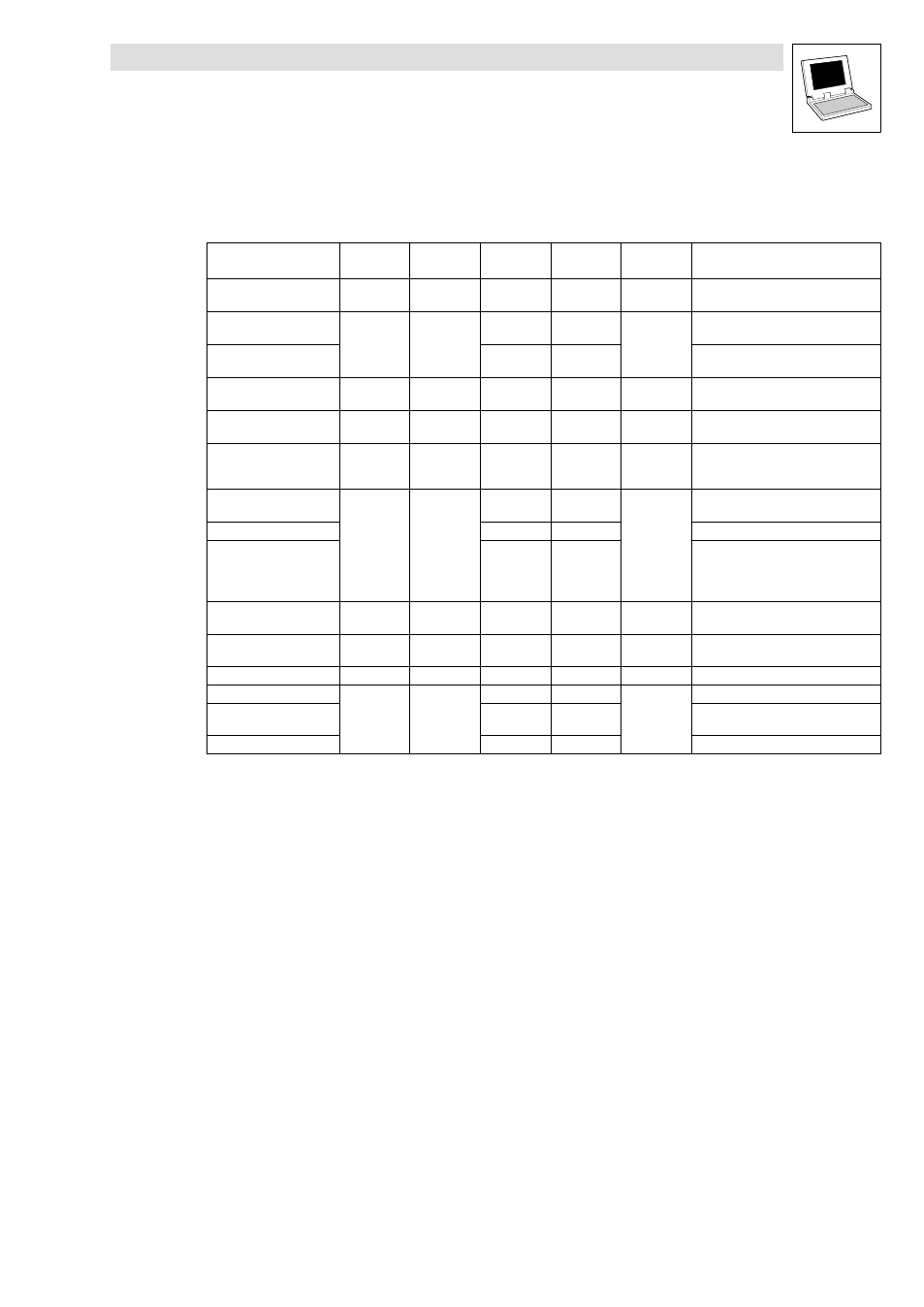
Outputs_MCTRL
System variables
Variable
Data type
Signal type
Address
Display
Code
Display
Format
Note
MCTRL_bQspOut_b
Bool
Binary
%QX131.0.0
C0907/3
bin
TRUE = Drive carries out quick stop
(QSP)
MCTRL_nHiMLim_a
Integer
Analog
%QW131.4
C0906/4
dec [%]
Upper torque limitation
·
in % of C0057
MCTRL_nLoMLim_a
%QW131.3
C0906/3
Lower torque limitation
·
in % of C0057
MCTRL_bNMSwt_b
Bool
Binary
%QX131.0.1
C0907/2
bin
FALSE = Speed control
TRUE = Torque control
MCTRL_nNAdapt_a
Integer
Analog
%QW131.12
−
−
Adaptive proportional gain (V
p
) of the
speed controller
MCTRL_bILoad_b
Bool
Binary
%QX131.0.3
C0907/4
bin
TRUE = Integral action component of
the speed controller is accepted by
MCTRL_nISet_a
MCTRL_nISet_a
Integer
Analog
%QW131.7
C0906/8
dec [%]
Integral action component of the
speed controller
MCTRL_nNSet_a
%QW131.1
C0906/1
Speed setpoint
MCTRL_nPAdapt_a
%QW131.8
C0906/9
Effect of C0254 on the proportional
gain (V
p
) in %,
·
The absolute value (without sign) is
processed.
MCTRL_dnPosSet_p
Double
Integer
Position
%QD131.5
C0908
dec [inc]
Deviation of set phase to actual phase
for phase controller
MCTRL_nPosLim_a
Integer
Analog
%QW131.9
C0906/5
dec [%]
Effect of the phase controller
·
In % of N
max
(C0011)
MCTRL_bPosOn_b
Bool
Binary
%QX131.0.2
C0907/1
−
TRUE = Activate phase controller
MCTRL_nNStartMLim_a
Integer
Analog
%QW131.5
C0906/6
dec [%]
Lower speed limit for speed limitation
MCTRL_nMAdd_a
%QW131.2
C0906/2
Additional torque setpoint or torque
setpoint
MCTRL_nFldWeak_a
%QW131.6
C0906/7
Motor control