Inputs_mctrl, 9300 servo plc, System blocks – Lenze DDS Target 9300 Servo PLC V8.x User Manual
Page 59: 1 inputs_mctrl, System variables
9300 Servo PLC
System blocks
2.12
MCTRL_MotorControl (node number 131)
2−53
L
9300 Servo PLC EN 5.1
The process image is created in the course of a fixed system task (interval: 1 ms).
·
Exception: MCTRL_bActTPReceived_b, MCTRL_dnActIncLastScan_p and MCTRL_nNAct_v
are read into the process input image of the task in which they are actually used.
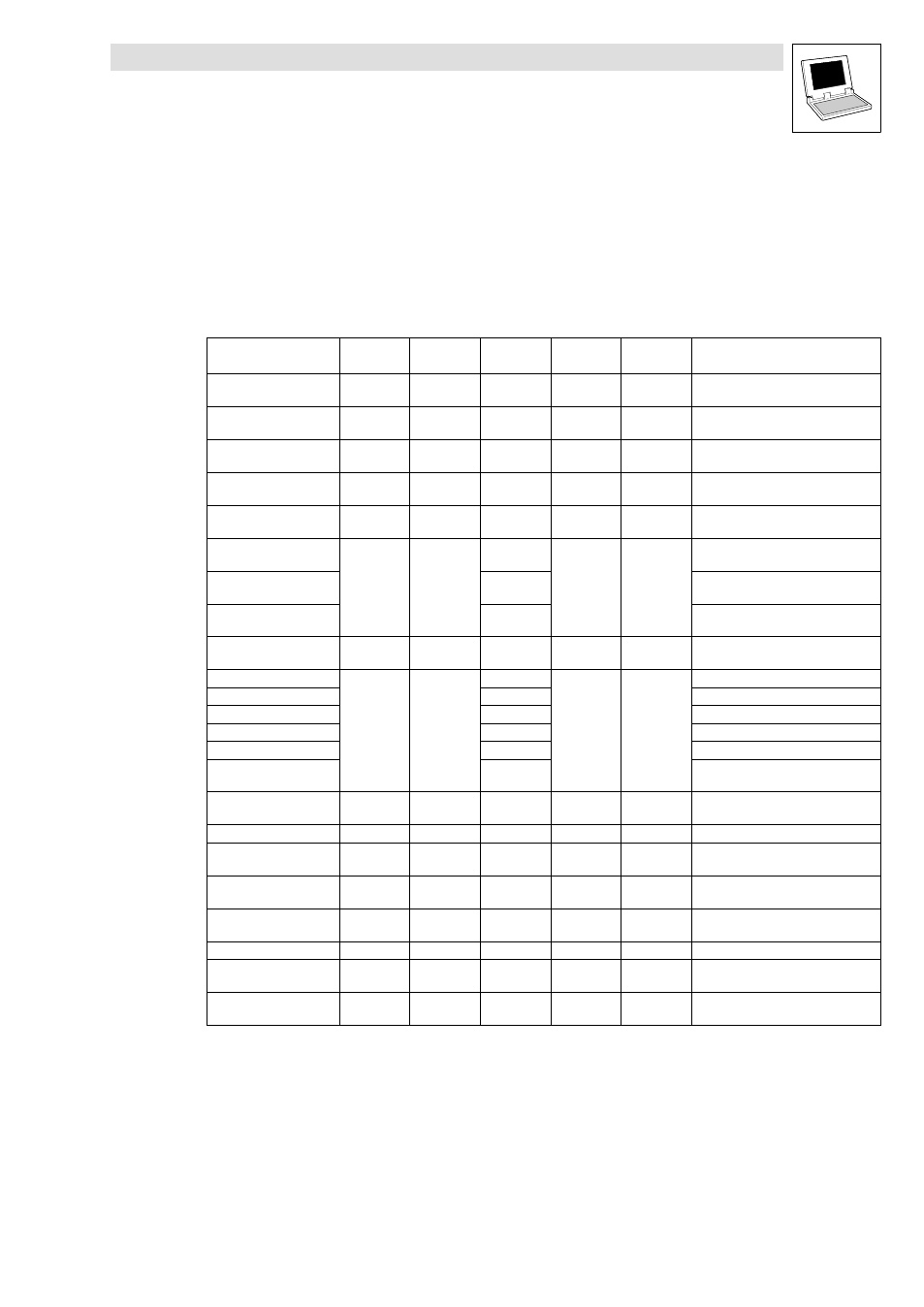
2.12.1
Inputs_MCTRL
System variables
Variable
Data type
Signal type
Address
Display
Code
Display
Format
Note
MCTRL_bQspIn_b
Bool
Binary
%IX131.0.0.
0
C0042
bin
TRUE = Drive carries out quick stop
(QSP)
MCTRL_nNSetIn_a
Integer
Analog
%IW131.1
C0050
dec [%]
Speed setpoint
·
16384
º 100 % n
max
(C0011)
MCTRL_bMMax_b
Bool
Binary
%IX131.0.2
−
−
TRUE = Speed controller operates
within the limits.
MCTRL_nMSetIn_a
Integer
Analog
%IW131.3
C0056
dec [%]
Torque setpoint
·
16384
º 100 % M
max
(C0057)
MCTRL_bIMax_b
Bool
Binary
%IX131.0.1
−
−
TRUE = Drive operates at current limit
C0022
MCTRL_nIAct_a
Integer
Analog
%IW131.5
−
−
Actual motor current
·
16384
º 100 % I
max
(C0022)
MCTRL_nDCVolt_a
%IW131.6
DC voltage
·
16384
º 1000 V
MCTRL_nMAct_a
%IW131.4
Actual torque
·
16384
º 100 % M
max
(C0057)
MCTRL_wMmaxC57
Word
−
%IW131.16
−
−
Display of maximum torque
(C0057) x 10
MCTRL_bUndervoltage_b
Bool
Binary
%IX131.0.3
−
−
Monitoring: Undervoltage
MCTRL_bOvervoltage_b
%IX131.0.4
Monitoring: Overvoltage
MCTRL_bShortCiruit_b
%IX131.0.5
Monitoring: Short circuit
MCTRL_bEarthFault_b
%IX131.0.6
Monitoring: Earth fault
MCTRL_bIxtOverload_b
%IX131.9.2
Monitoring: I x t overload
MCTRL_bSpeedLoop
Fault_b
%IX131.9.4
Monitoring: Speed out of tolerance
margin
MCTRL_nPos_a
Integer
Analog
%IW131.7
−
−
Actual phase value as an analog signal
·
90°
º 100%
MCTRL_nNAct_v
Integer
Velocity
%IW131.8
−
−
Actual speed value [inc/ms]
MCTRL_nNAct_a
Integer
Analog
%IW131.2
−
−
Actual speed value
·
16384
º 100 % n
max
(C0011)
MCTRL_dnPos_p
Double
Integer
Position
%ID131.5
−
−
Rotor position of the motor
MCTRL_bNmaxFault_b
Bool
Binary
%IX131.0.7
−
−
Monitoring: Max. system speed
exceeded
MCTRL_nNmaxC11
Integer
−
%IW131.15
−
−
Display of max. speed (C0011)
MCTRL_bActTP
Received_b
Bool
Binary
%IX131.0.10
−
−
Receive touch probe (TP)
MCTRL_dnActIncLast
Scan_p
Double
Integer
Position
%ID131.6
−
−
Dinc between TP and task start